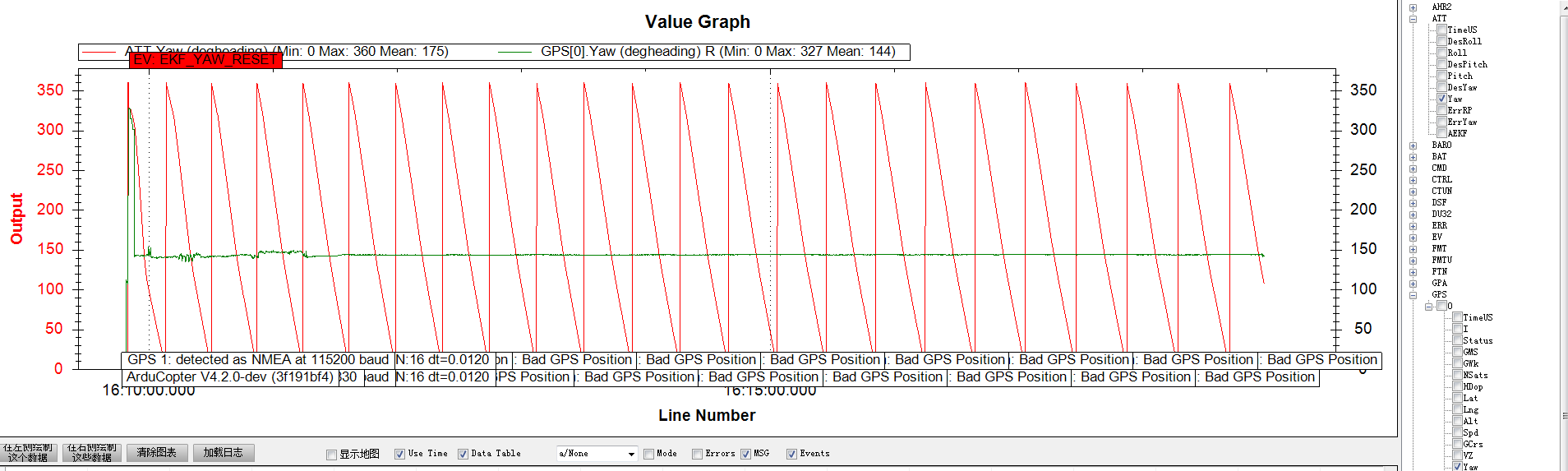
Hi! I used the new version of the firmware(Copter4.2.0-dev) to test on the ground and the yaw drift, but it was difficult to reproduce it later. I attached the log: https://1drv.ms/u/s!AtY6Wtn1T07BcfU5bEg7ZWY1JZY?e=7djaWp
I hope you can see it sometime.
Txs for the report. I’ve asked @tridge if he can have a look and see what’s going on.
My first guess is that the GPS position isn’t good and this has reduced the EKF’s confidence in the yaw as well. Are you testing indoors by any chance?
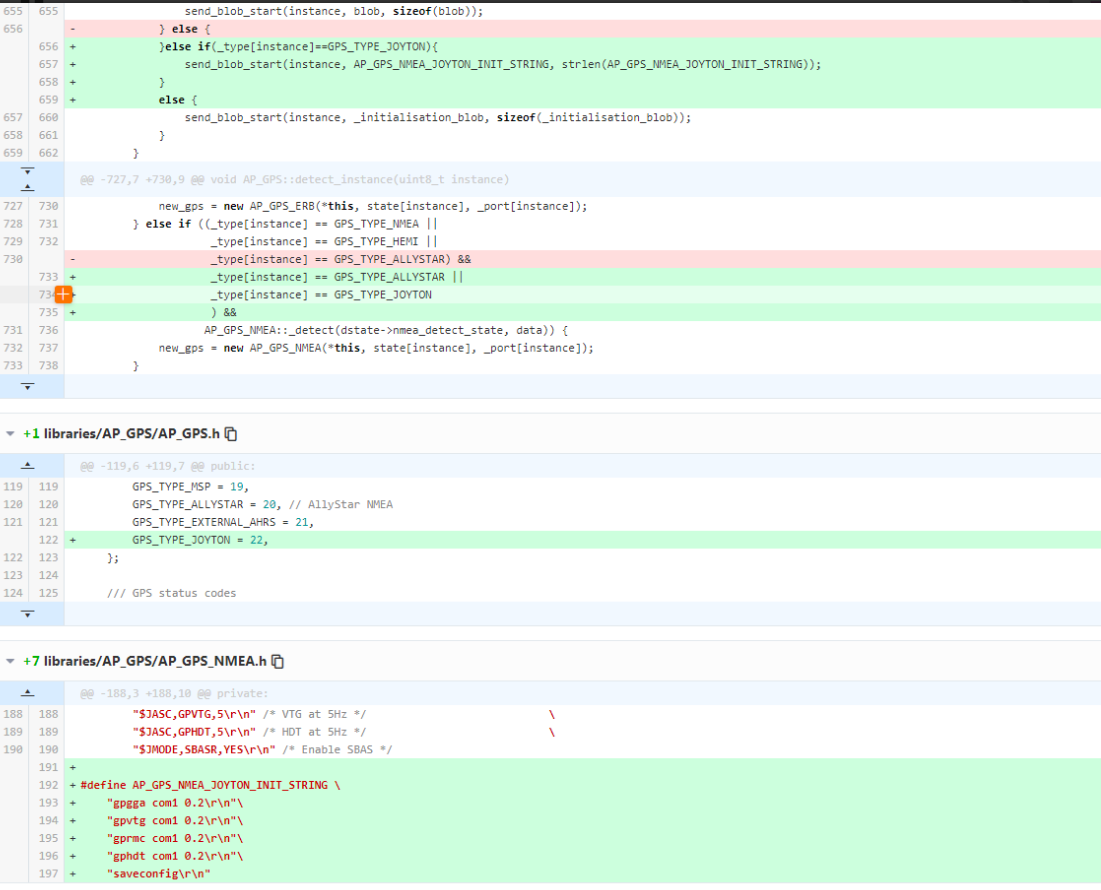
that log doesn’t seem to correspond to a version in our git repository. Can you point us at the git repo with this version?
Also, can you try with the latest development version and the following settings:
LOG_REPLAY=1
LOG_DISARMED=1
LOG_FILE_BUFSIZE=100
that will get us a “replay” log that should make it possible for us to reproduce the issue inside a debugger.
What model of GPS is it? Do you know what exact NMEA sentences it is producing? A sample capture of a few seconds of the NMEA stream would be very useful.
@rmackay9
Thank you for your reply. Sorry, I didn’t reply in time.
Yes, this is the data I tested outdoors. Test the yaw of copter will always drift indoors, because I use single point positioning, and the position error is large, resulting in large changes in GPS YAW angle output.I tested it outdoors for a few days, and it never happened again.
@tridge
Okay, I haven’t encountered this problem yet, it seems difficult to reproduce it again. I have set these parameters. If I encounter the problem again, I will post a new log.Thanks!