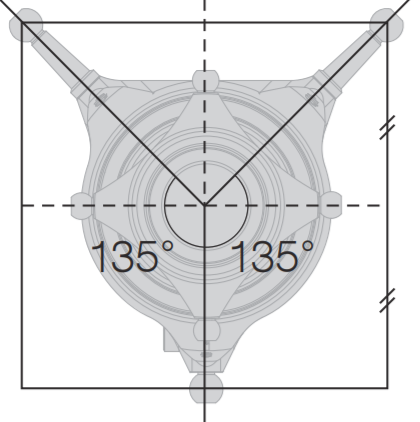
Hi folks, I’m possibly being a mong, but I’m melting my brain trying to figure out swashplate servo values for my Raptor e820, and would like some help/clarification… The aircraft uses the typical 3 servos on the swashplate, but in a 135° configuration.
However, the manual for the aircraft says if the 135° isn’t an option, use a 140° mix, which I’m doing.
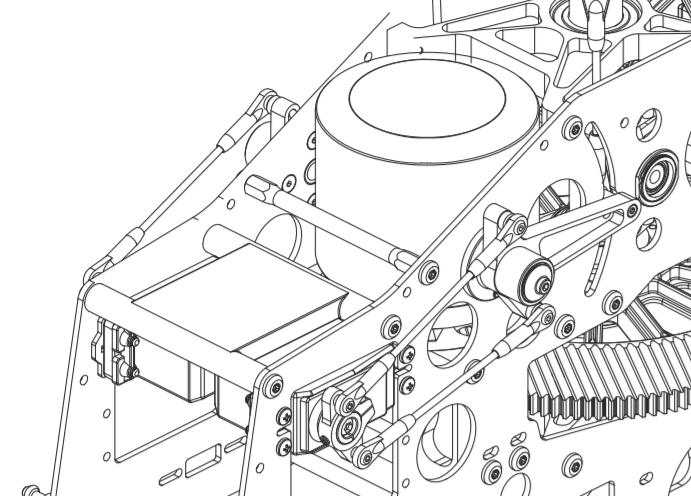
It also uses push pull linkages on the forward two servos:
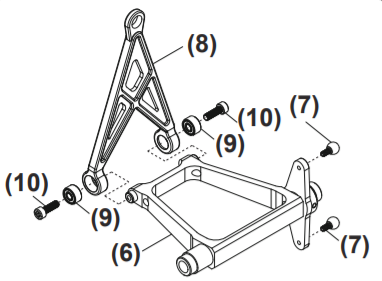
And an a frame on the aft servo that doubles as an anti-rotation linkage:
The airframe has convenient through holes in the frame which line up with holes in the servo to swashplate linkages…
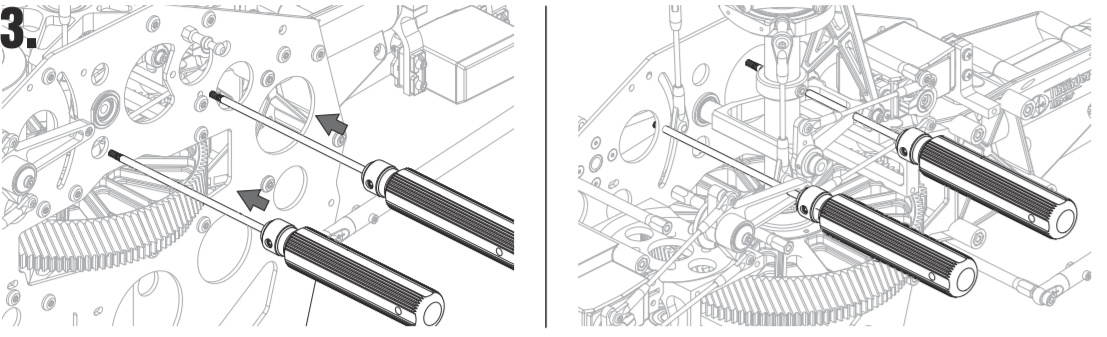
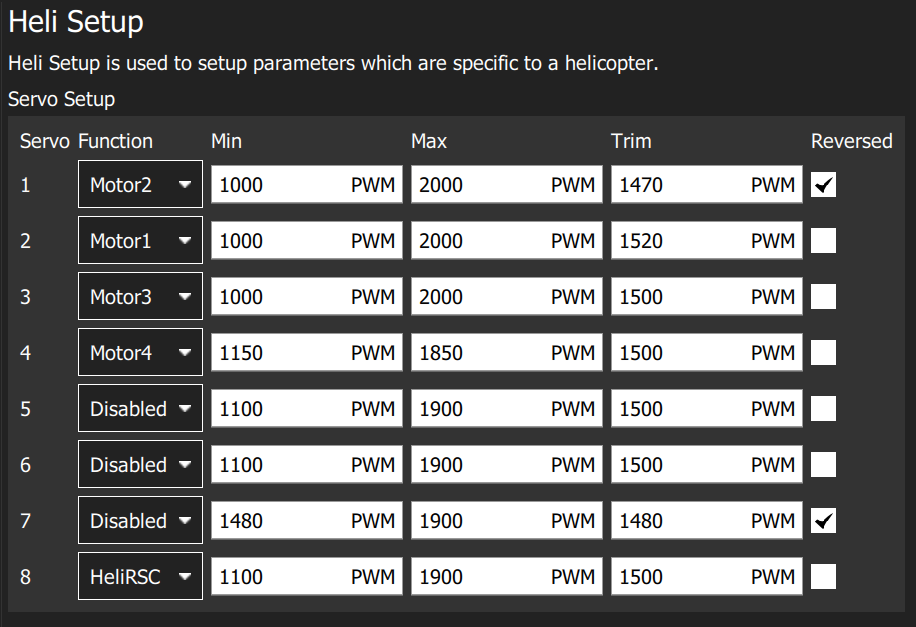
…and the procedure to set the servos is to remove the servo horns, level the swashplate and pin it in place, zero the servos to the middle of their travel, and attach the horns, which I’ve done by following Chris Olson’s guide in the Arducopter Ground School videos, and set the servos min to 1000pwm, max to 2000pwm & trim to 1500pwm, then reattached the horns to the servos. This gives me -5.8° pitch all round.
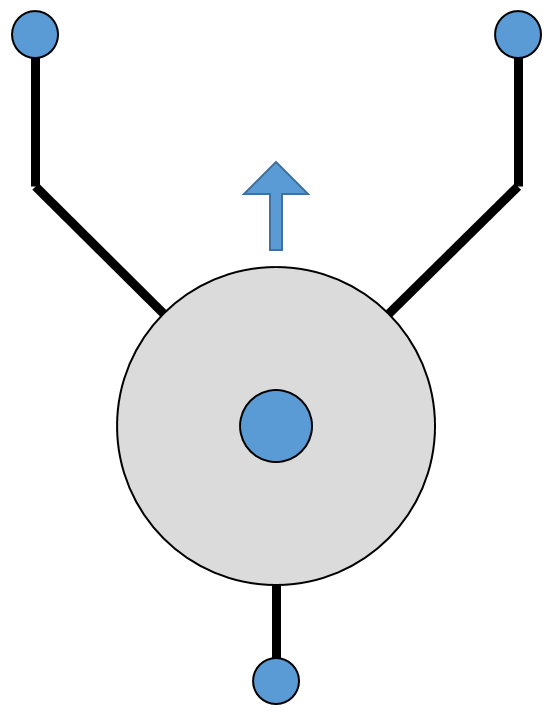
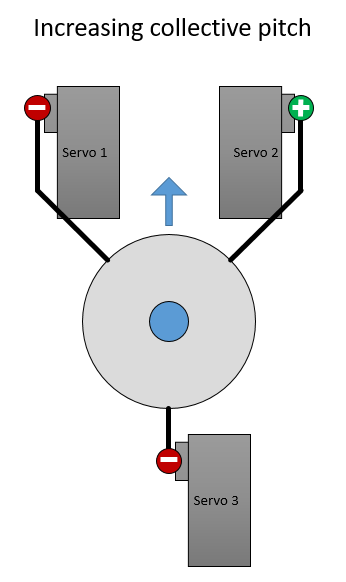
There are unequal length washout arms just below the head, which attenuate and invert the movement of the pitch control rods relative to the travel of the swashplate, which I’ve got my head around. And the starboard servo is essentially in the same orientation as the port one, just rolled 180°, inverting it’s direction of travel. Taking into account the washout arms and the servos positions, I understand these motions:

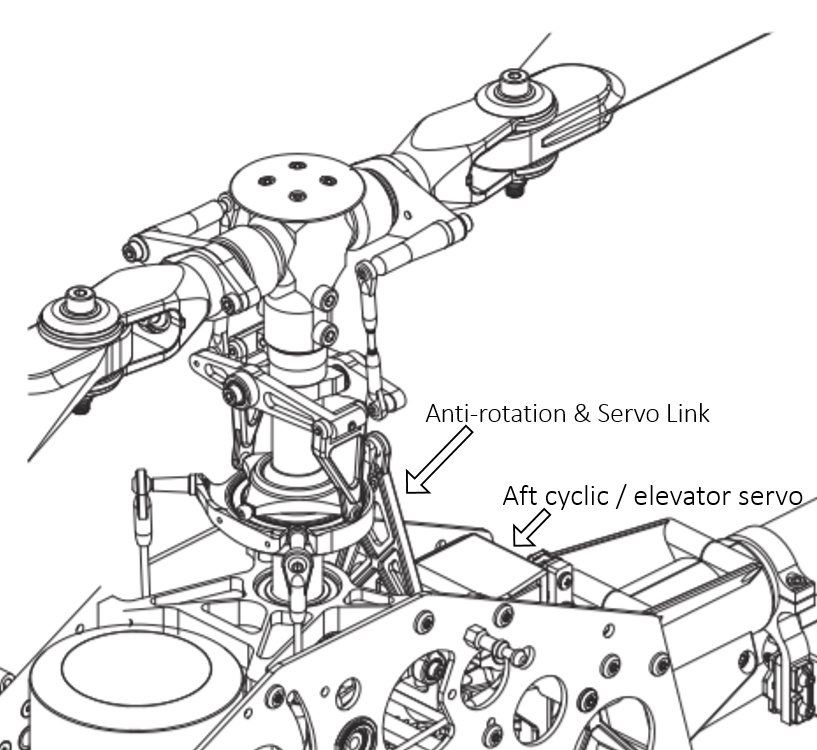
But I’m getting tied in knots with the trimming of the servos… Which I think stems from the fact that, as you’ll see see in the following diagram, the elevator link is shorter than the two aileron links…
…meaning that the elevator/pitch/aft servo has to move less to achieve the same movement of the swashplate.
So at the minute, having zeroed the servos relative to the linkages as per the aircraft’s manual, I’m sat with -5.8° on the servos at 1500pwm on the Durandal. I’m trying to adjust the trim values while keeping the swashplate level, to establish the values for min and max collective, which is proving to be a nightmare. I know to add 100 to servo 1, and subtract 100 from servo 2, but if I add 100 to servo 3 I end up with the swashplate out of level.
Can someone explain to me how to figure out what my max and min values for the three servos should be? And once I establish the min/max values for all three servos to give me -3° to +12° pitch, which servo is the one that dictates the min/max collective PWM values? Also, because of the reversed collective arising from the washout arms, can I have min collective value higher PWM than max collective PWM value?
I’m toying with the idea of flipping the pitch control horns to the other side of the blade holder and taking the +5.8° at 1500pwm as my midpoint, then it would mean swashplate goes up and pitch goes up. However, that would still leave me trying to dance around the unequal throw of the forward aileron servos relative to the aft elevator one, and that has got me completely stumped.
I’d also been toying with the idea of adjusting the pitch control rod lengths, but there isn’t a lot of room there, and they are at the length in the manual, and the servo linkages are as per the manual, so I know those values are right. But again, that still leaves me the unequal lengths to contend with.
I hate to do this, but I’m stumped, please help…