I have a 3-part question with a Quadcopter I have flown for a bit trying to debug a few issues but eventually resulted in a crash (the crash itself does not seem related to these issues but it would be nice to double check).
The Quadcopter:
17in Props
Cube Orange
Copter 4.6.2beta
Here 3 GPS
T-Motor MN5008
T-Motor Air 40a
Tarot 650 frame
I had manually followed the methodic configurator process and completed notch filtering, an initial autotune, and a magfit. However, I would get quite a few “GPS Glitch or Compass Error” followed by a “Glitch Cleared” as well as EKF lane switches.
Seems like the GPA.SAcc is pretty high in my log and is setting off the error. What would cause this? The drone was flown in an open field and all other GPS values seemed reasonable for a non-RTK flight.
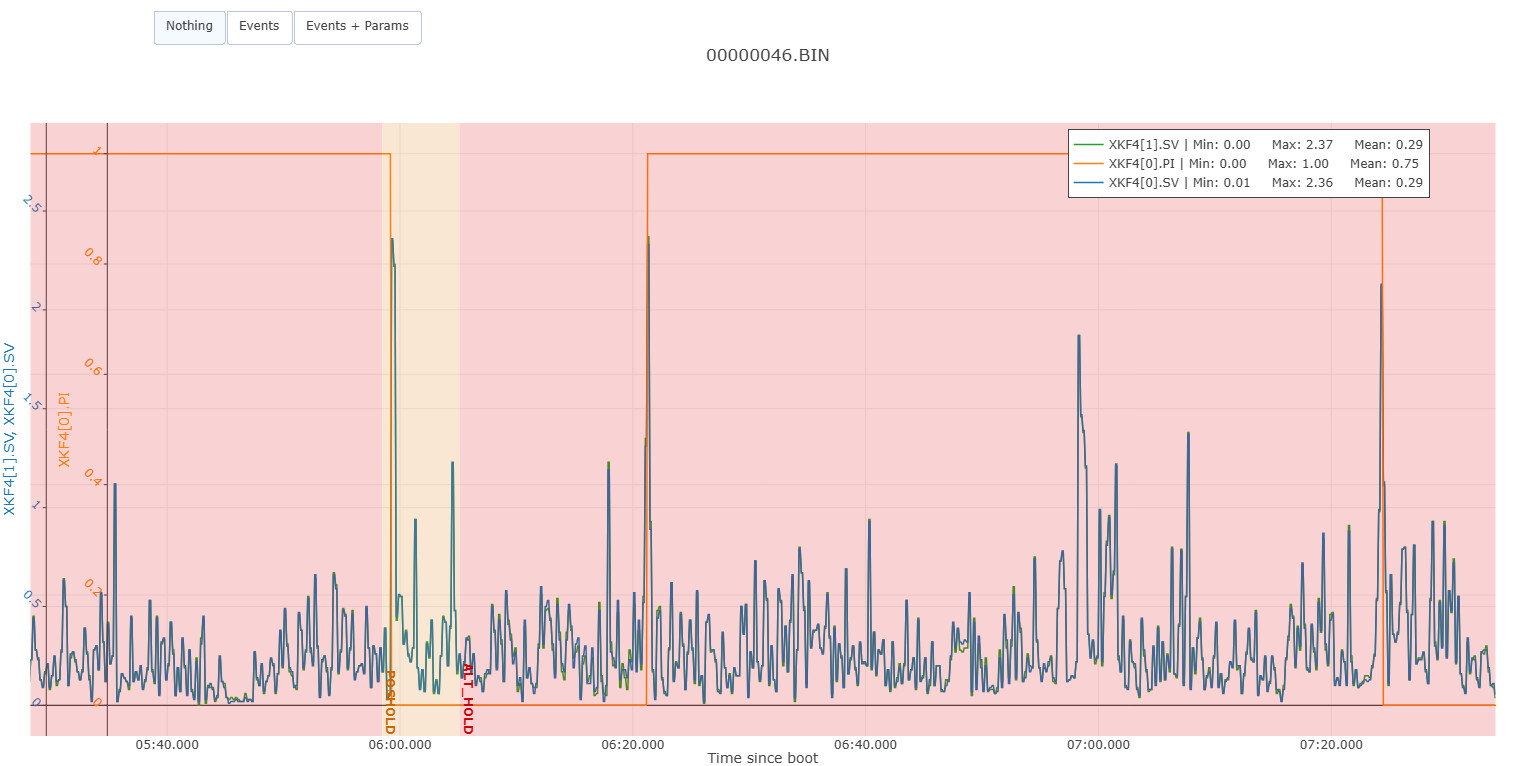
The EKF lane switches quite often during flight as well. From digging through the logs, it seems to be caused by the GPS altitude and Barometer estimates diverging during flight. This doesn’t seem to do anything as there is only one GPS and both EKF lanes use it. Is this of any concern?
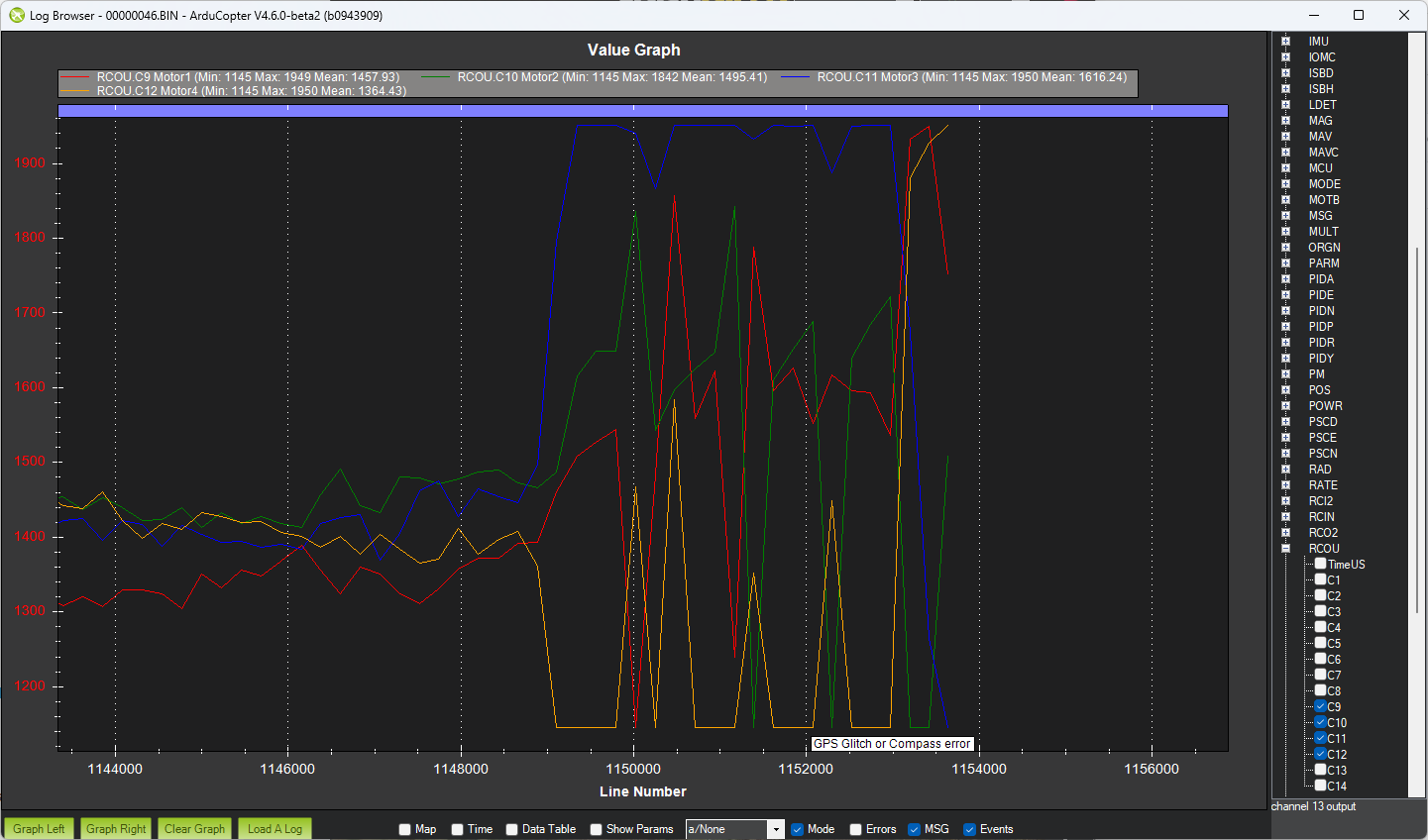
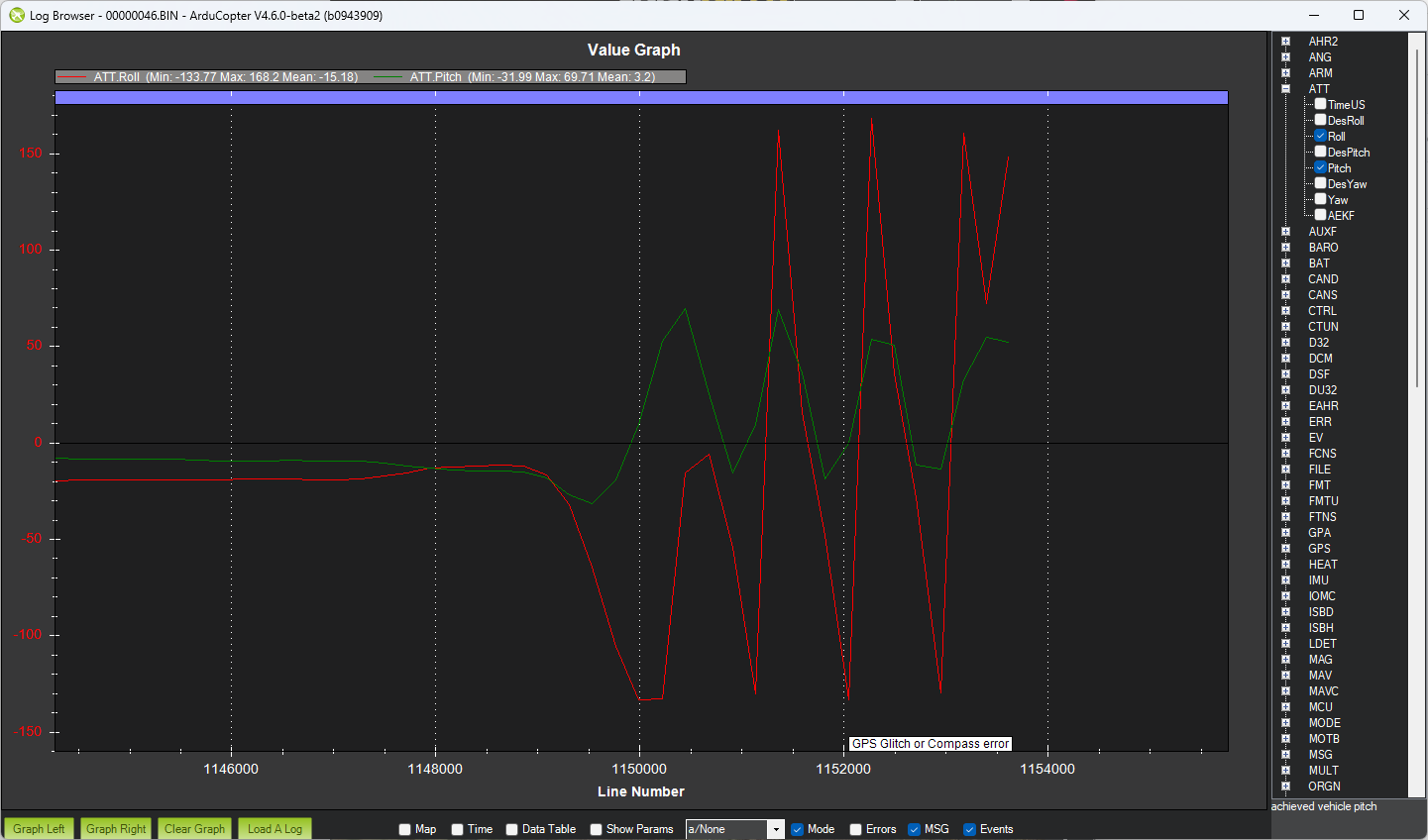
I was conducting some figure-8 flights for a second magfit (in case it was the compass) when motor 3 failed which resulted in a crash. Would anything in the log suggest an ESC desync to cause this? It is also possible that one of the phase wires broke on motor 3 during the flight as the wire was found disconnected.
No USB 3 devices. Just an ELRS receiver and an RFD900 ux. The CAN cable off the Here 3 runs close to a coax extension off the RFD900 to an antenna, could that be causing the issue?
Looking at logs of some identical drones flown on 4.5.2 last summer shown this similar issue although not as constant. I initially thought it was the compass at the time but looking back, the noise from the compass was good enough and shouldn’t have been an issue.
Thanks for testing the beta and raising this report. I agree with your assessment that the crash was caused by an ESC or Motor failure on Motor3. It shows the classic sign of the failed motor output going to full and the opposite motor output going to minimum.
I don’t think there’s anyway for us to know if the failure is caused by an ESC desync vs a broken wire. I suppose if ESC feedback was enabled there might be a way but sadly so few ESCs support this. Hopefully with more AM32 ESCs appearing that will change (some BLHeli ESCs also support feedback)
Yeah, seems like the only solution is to avoid T-motor Air and Flame ESCs after digging through other forum posts about them. We have had 3 Air 40A and 3 Flame 60A stop working in-flight on our multirotors just last summer. I have been looking into swapping them out with APD or AM32 ESCs so there is feedback.
For my second question, is the poor velocity accuracy of the GPS is what could cause unnecessary lane switching? It seems that the switching occurs when the velocity variance spikes and chooses the lane with the highest value even though the difference between them is ~.5%. If so, I suppose something with the GPS is the reason for all of these messages.