Hi
I am here to ask you some help because recently, because I have some trouble with arducopter Radio telemetry connection.
I am currently using
- pixhawk 2.4.8
- APM:Copter V3.5.3 firmware
- PX4flow
- gps
- ppm encoder with RadioLink radio receiver
- Radio telemetry
- Lidar-Lite V3 (connecting via PWM)
The thing is that… there is no problem with connecting to mission planner via ‘USB’ or ‘Radio telemetry’. It works perfect. and I can connect to my copter via dronekit script if I use ‘USB’ cable… strangely, I cannot connect only when I’m using the dronekit script and ‘Radio telemetry’
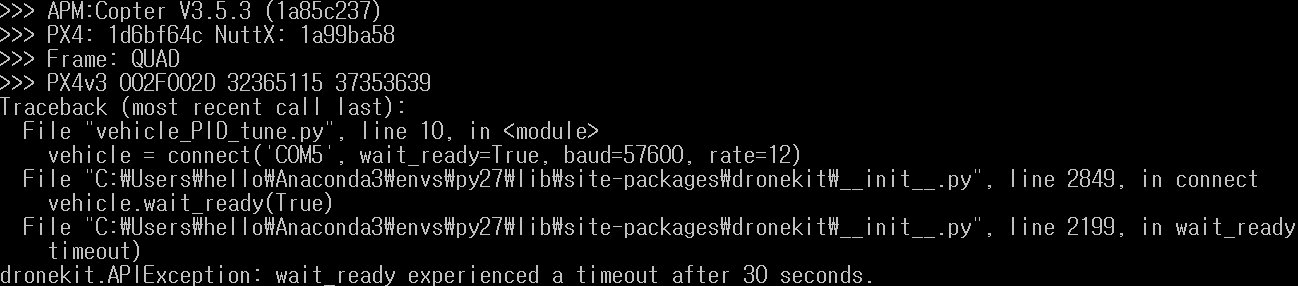
The console said like this. I can see that the telemetry is receiving the arducopter’s information when I execute the script but it failed to connect after all anyway
Could you give me some advise…? Please help!
Thank you in advance