I have been trying to get my Jetson TX2 (dev edition) to connect to the Pixhawk for about 2 days now with no luck. This documentation didn’t really help to much.
At this point I have all the software installed on the TX2 for mavlink, mavproxy, etc. and it is running Jetpack 3.1. I have tried both connecting the GPIO pins to the designated UARTs and using a USB cable with no luck. I have also tested with the Pi3 and that works, so the Pixhawk is sending the data.
Does anyone have a good way of getting these two to talk to each other?
Does anyone have an answer to this? I have a TX2 (dev kit + dev board) and am trying to connect my Pixhawk 4 to it. I’m also using a ZED Stereo Camera for Computer Vision (this is connected and works perfectly with my TX2, but I want to use this camera for shoreline detection and subsequently provide data to my Pixhawk for object avoidance). Any advice?
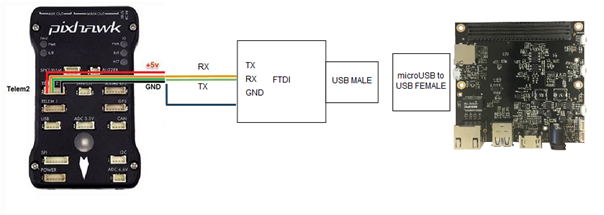
If you want to connect the Jetson TX2 as a companion computer, physically to the Pixhawk (not through Wi-Fi for ex), you can follow my configuration for example :
Using a FTDI device : Plug it on one side like a USB to the Jetson Board and on the other side like UART wires to the Pixhawk (to TELEM2 port)
Then, you can use ROS (with Mavros) or dronekit to communicate to the Pixhawk
Like this (here, I have a LI-TX1-CB board, which has only a microUSB) :
The only thing, important, DO NOT PLUG the 5v between the two components.
If I’m already occupying TELEM 1 and TELEM 2 with my RC receiver (X8R) and the GCS Telemetry Antenna, respectively, would there be any other pinouts on my Pixhawk 4 that I can connect my TX2 board into??
Thank you for your extremely fast and insightful response with diagrams. It’s very much appreciated!
You can replace the GCS Antenna for the Jetson. If you have a Wi-Fi in the area, the companion computer can be connected to it. Then connect your GCS to the same network, select UDP or TCP communication with the right IP, and voilà, your GCS is communicating to your Pixhawk through the companion computer (I only tried and succeed with mavros in this case).
That is an excellent solution. However, in my use-case I am attempting to build an ASV that is self-reliant in GPS-denied environments. My plan is to use CV with a ZED Stereo Camera and CUDA/VisionWorks libraries for shoreline detection. I have no need to store the video, but I do want to relay pre-defined critical data (i.e. a shoreline feature) to the Pixhawk 4 to use in it’s object avoidance capabilities in order to stay a minimum distance away from the shore.
Instead of using a pre-planned “Mission” mode in QGroundControl, I want to customize one where I flash the PX4 firmware and my Pixhawk 4 pre-defines it’s own waypoints using it’s own IMU module (and perhaps the ZED Stereo Camera’s 6-DOF IMU as well) and detection of a shoreline (given that the boat is oriented by the user from the start in such a way that the shoreline is already on one side or the other).
The apparence is easy, the physics behind is less easy. I haven’t tried it, so not sure at all it can work. For SITL integration, in theory you can do it, but idk if ArduPilot already developed it. If not, I recommand to follow the example for Copter, and try to apply what they have done but for boat. It can be a long road…