Hello everyone,I’m working on a ROV using Pixhawk 2.4.8 as my flight controller and Raspberry Pi 4B with Ubuntu 22.04 LTS and ROS2 Humble as my companion computer.I’m having trouble running this command:
ros2 run mavros mavros_node apm.launch fcu_url:=/dev/ttyAMA0:921600.
I got no errors,but it kept warning me:
[WARN] [1715323006.448780261] [mavros_router]: Message dropped: msgid: 0, source: 1.191, target: 0.0
[WARN] [1715323006.526942038] [mavros.sys]: VER: broadcast request timeout, retries left 4
[WARN] [1715323007.527151779] [mavros.sys]: VER: broadcast request timeout, retries left 3
[WARN] [1715323008.528515426] [mavros.sys]: VER: unicast request timeout, retries left 2
[WARN] [1715323009.526817407] [mavros.sys]: VER: unicast request timeout, retries left 1
[WARN] [1715323010.526988221] [mavros.sys]: VER: unicast request timeout, retries left 0
[WARN] [1715323011.528091072] [mavros.sys]: VER: your FCU don’t support AUTOPILOT_VERSION, switched to default capabilities
[WARN] [1715323017.448259958] [mavros_router]: Message dropped: msgid: 0, source: 1.191, target: 0.0
[WARN] [1715323017.448259958] [mavros_router]: Message dropped: msgid: 0, source: 1.191, target: 0.0
[WARN] [1715323017.448259958] [mavros_router]: Message dropped: msgid: 0, source: 1.191, target: 0.0
The version of my pixhawk‘s firmware as follows:
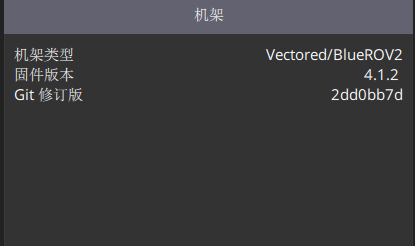
Please let me know where I’m going wrong for I’m only a beginner at using this.
/dev/ttyAMA0:921600. Change the buadrate to 57600, rerun the file again. It works for me