I am setting it on a Skid Steering. The servo outputs show my desired skid steering.
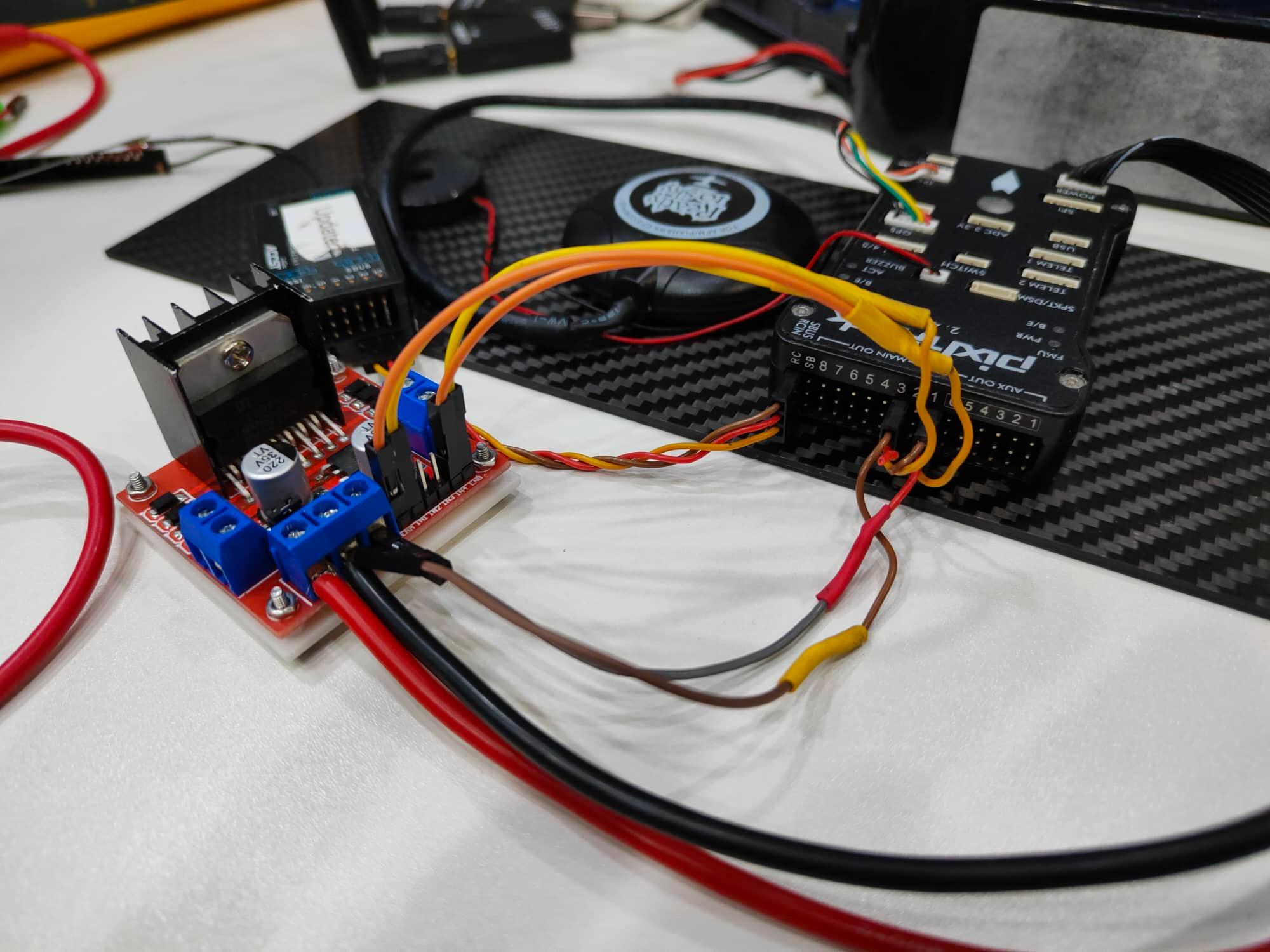
Pixhawk’s Main OUT 1 and 3 are connected on the Motor Driver L298N’s ENA, IN1 and ENB IN4.
Whenever I try to move the controller, the voltage output is constant to 12v when its supposed to vary according to the change in the controller. Did I miss something in the auxiliary here? Thanks for the help
That controller is not directly compatible with the type of PWM signal output by your autopilot. ArduPilot outputs RC/servo PWM. The controller expects a duty cycle based signal.
As far as I can tell, that should not work based solely on the wiring shown in the video. The demonstration has the wiring completely blurred, and I fear it may be misleading.