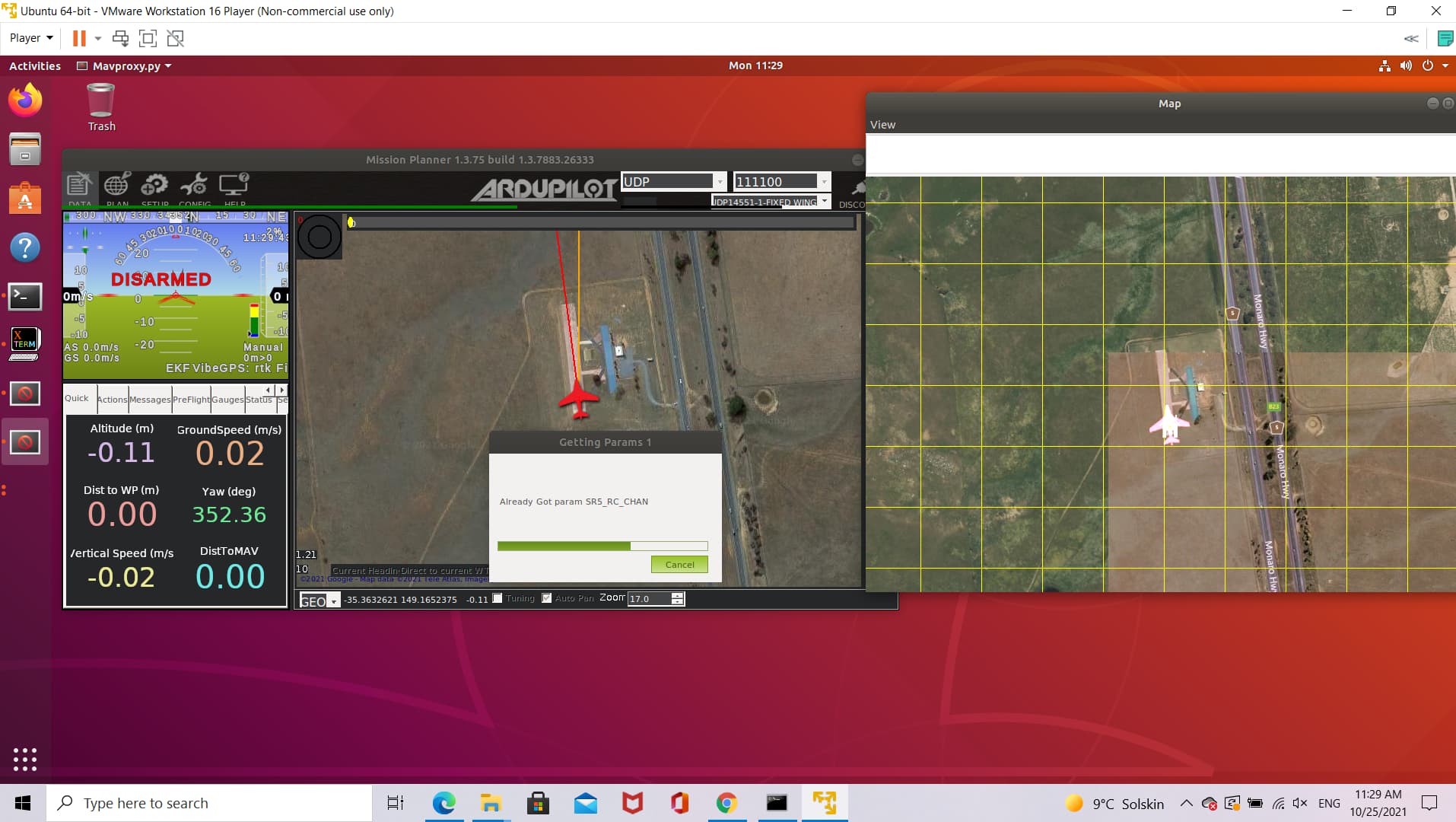
Hi I am actually trying to connect SITL to the mission planner on my virtual machine and for some reason it ends on getting parameter forcing me to update firmware to 4.1.2 and then crashes.
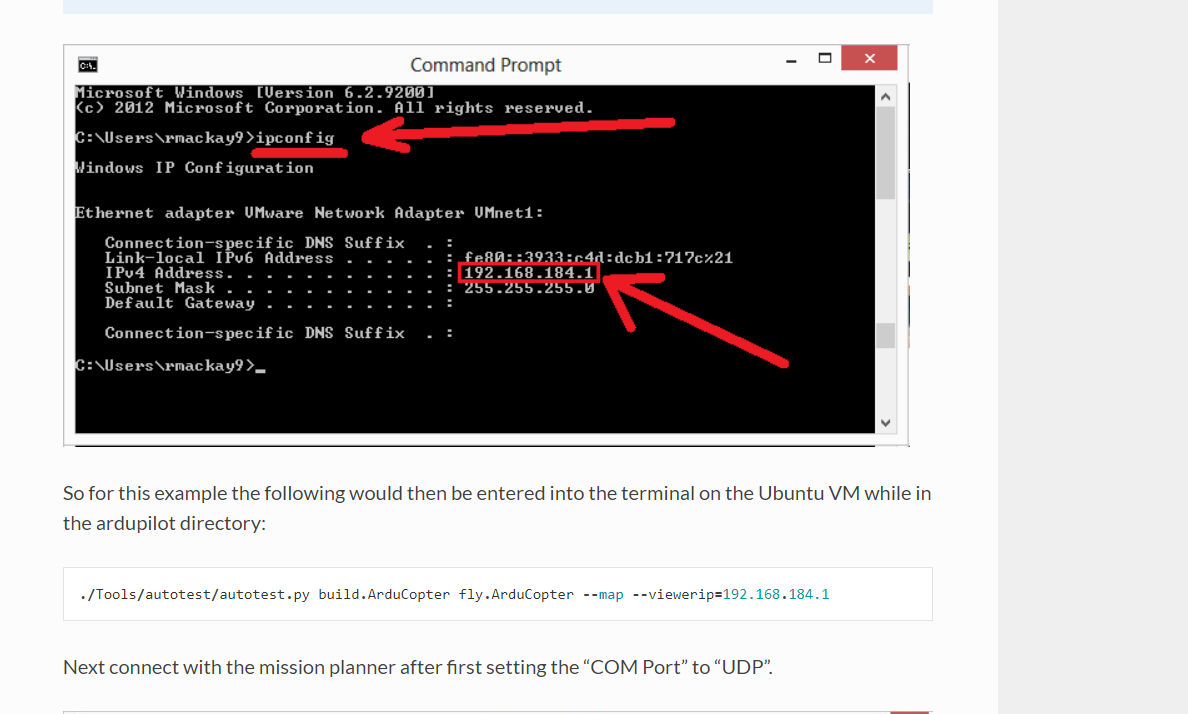
I changed my VM network type to bridge now instead of NAT and in both the cases it doesnt work hence I assumed it might be with the ip configuration as there is an additional step if you use VM you got to configure IP of the host machine as described in the link.
SO again.
What is your HostOS ? Is it a Windows, a Linux os Ubuntu
Your runs an VmWare under your HostOS ?
You tries to run Mission Planner under Ubuntu and connects to a SITL instance also compiled and run under Ubuntu ? Are you SU ?
Or you runs Mission Planner under your HostOS and tries to connect to SITL in Ubuntu ?
(built in SITL in Mission Planner works only on Windows)
@Eosbandi am using windows as my host operating system
My VMware is hosting linux Ubuntu 18.04 on the windows machine
I am trying to run everything on Ubuntu linux
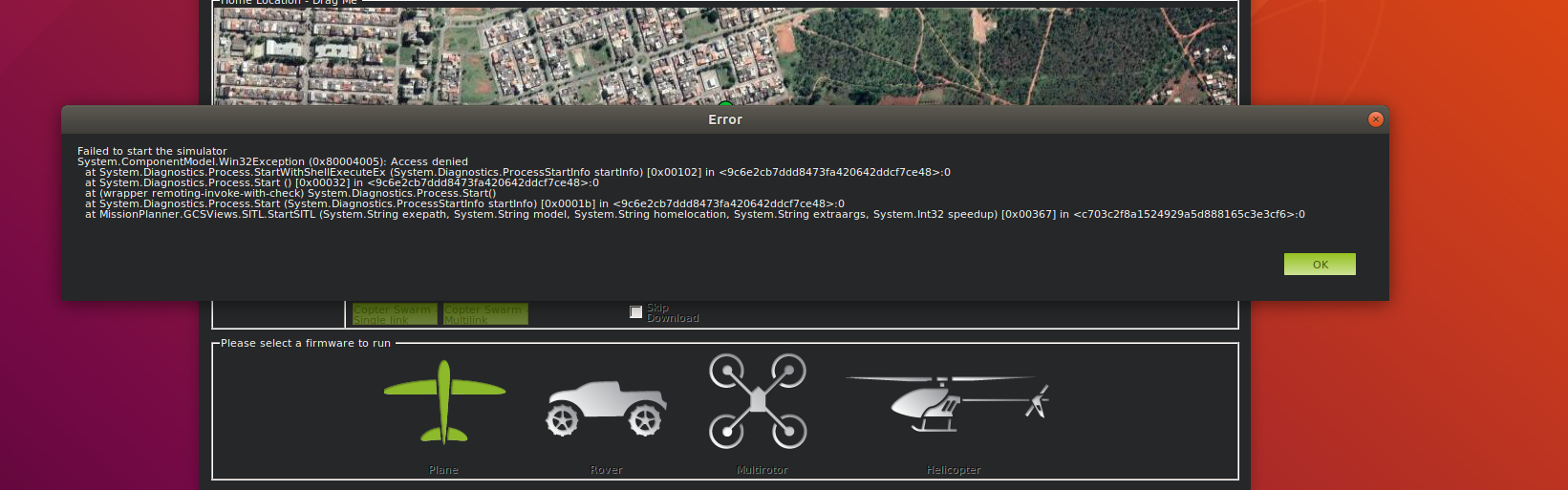
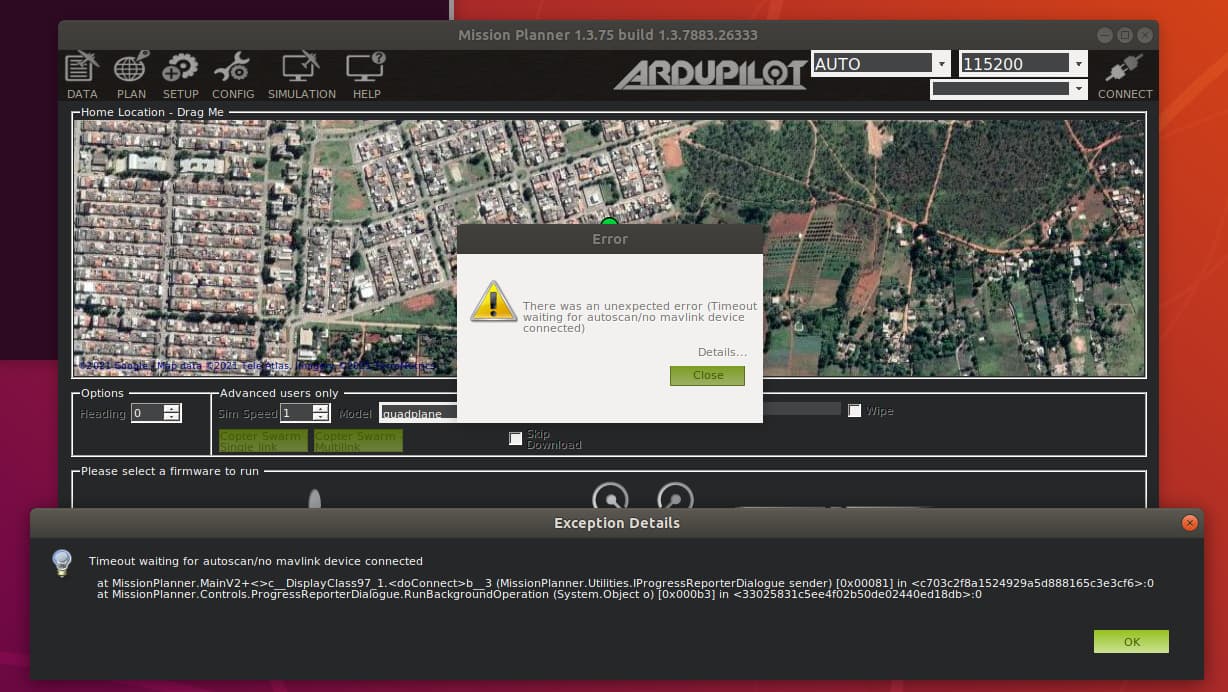
I was trying to run mission planner solo but then it still cant connect as it has an error as seen below
I could read this error for windows they need to fix the arduino driver and I am not sure for the windows
hence I tried to connect it through SITL instance and it didnt work either.
I will look for WSL so far I have been following ardupilot page I have had used mission planner with cygwin terminal before though!
Hi, I also got these errors and hardly took off.
I think I can suggest you something, If you don’t need mavproxy( In my case, I use sim_vehicle to validate my pymavlink code, so I connected sim with each pymavlink_connection and GCS as Mission Planner)
My Case( MissionPlanner, Sim_vehicle on WSL, Spyder as python IDE )
In your path “python3 sim_vehicle.py -v ArduCopter --no-mavproxy”
In your mission planner, Select ‘TCP’ and Click Connect.
hostIP = localhost(if WSL and MissionPlanner run in same computer) Port= 5760(Default setting).
In Python, You can follow the manual of pymavlink connection like “mav = mavutil.mavlink_connection(‘tcp:localhost:5762’)”
I also could connect my Jetson board as Linux and MP on Windows labtop(**3 hostIP = Jetsonboard IP). So I think you can success…