Hi all ,I want to use an NVIDIA Jetson to do on-board object detection from a quadcopter. However I do not know how to push the video feed from the fpv camera into the NVIDIA Jetson, and how to push the drone live footage with object detection results down the the ground control station/FPV goggles or using an FPV receiver. Has anyone done this before? If so can you please kindly help me with any solution on how to us FPV camera with jetson nano for on-board object detection and streaming the live video feed with bounding box results to the ground station. Thanks !!
Try referring to these threads -
Hi @Dineshkumar_elumalai , Thanks for the reply, my application should not use internet for transmission ,so the ultimate goal is to use RF for video transmission, there are some ultra long range video transmitter and receiver pairs, but the problem with them is they dont have direct connection with jetson to send the processed video to ground station instead they are sending continuous live feed directly to the ground station. Any suggestions in this line. Thank you
Ok understood, Check out this - https://doodlelabs.com/wp-content/uploads/2022/09/Low-Latency-CC-and-Video-Streaming-with-the-NVidia-Jetson-Nano-v0922.pdf
Hi @Dineshkumar_elumalai , Thanks for the reply, but the documentation u have sent just now from the smart radio configuration section it uses IP(Network) layer and use RTSP for streaming in the backend, which again needs active internet connection to the drone right?I need transmission without internet . Thanks for answering my queries patiently.
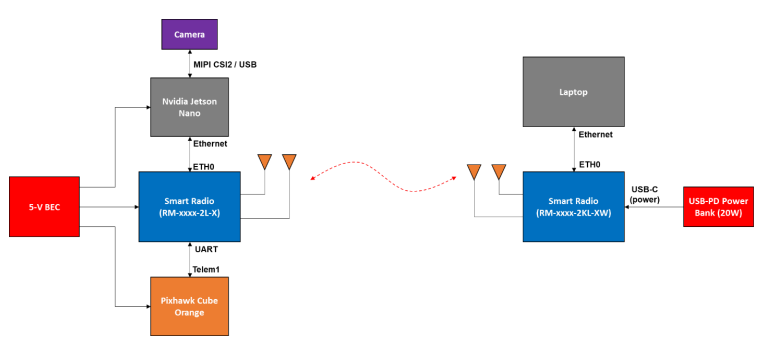
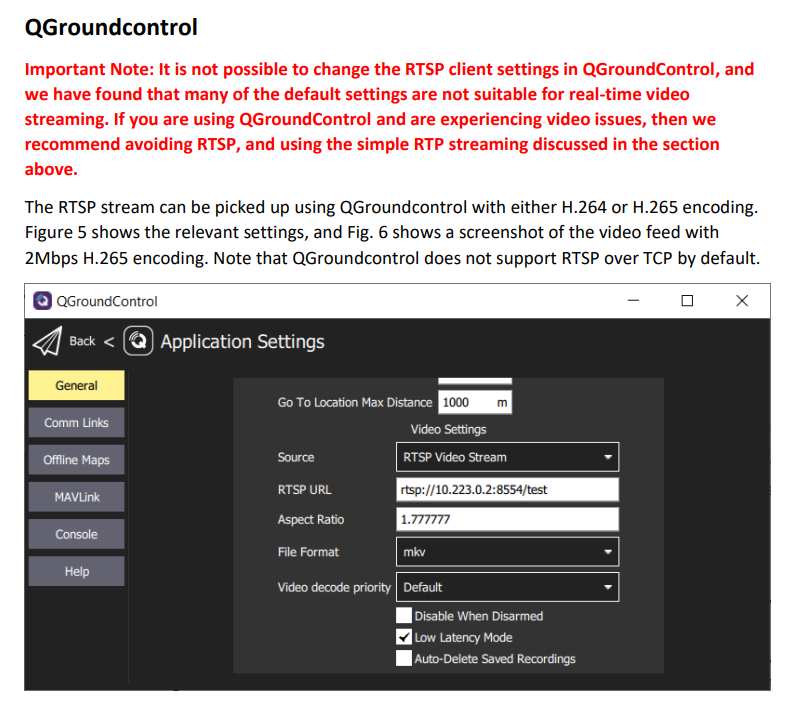
No, you don’t need an internet connection, as you can see below, it uses 2.4GHz frequency to transmit video, and using QGC you can able to view the streamed video (via RTSP).
Hi @Dineshkumar_elumalai, I thought they are using internet since they are setting up the DHCP client. Thanks for letting me know, do you have any idea what RF modules they are using sorry for troubling you, in the documentation they didn’t mention and even in their website i cant get any clear information, are these radios available directly in the market, if not cant we do anything like connecting an fpv cam to jetson nano which process and send to ground station via fpv transmitter which is also connected to the jetson nano. Thank you for your time.
Check this link for product details - Product Index - Doodle Labs Technical Library
There are no ports to connect a regular FPV camera to the Jetson. USB, Ethernet, and MIPI CSI-2 are the only ports on the Jetson for connecting a camera. Additionally, you can’t interface a regular FPV transmitter with the Jetson Nano.
Maybe, you can connect any of these Jetson-supported cameras and perform object detection on the Jetson. Now, keep the video on full screen in Jetson, and using the Herelink module you can transmit the video (using HDMI port).
Hi @Dineshkumar_elumala, one last question from my side, if i use RTSP for streaming without the need for internet, my application has 6 drones and each drone will transmit its individual live video feed to the ground station, can i have single RTSP server which receives the videos from all 6 drones where i can see live feed from all drones simultaneously in a single screen.Thanks for the response.
@Sandeep_k , Yes it is possible to stream multiple RTSP streams to an RTSP server and see the videos simultaneously on a single screen.
Hi @Dineshkumar_elumalai , I tried setting up RTSP server and client with in the same PC, so that got worked and streaming happens without internet, but when I tried setting up RTSP server in another system, and run client on my PC, i cannot able to stream, its says there unable to connect to local host, i think the client and the server need to connect with the same network for streaming but how do they connect with the same network without the internet connection. Thank you in advance.
Yes, the client and server should be on the same network. Jetson Nano(Drone) will act as client and laptop will be the server. You can use Doodle Labs module to keep both client and server in the same network (without the internet).
Hello Dineshkumar_elumalai