Hello
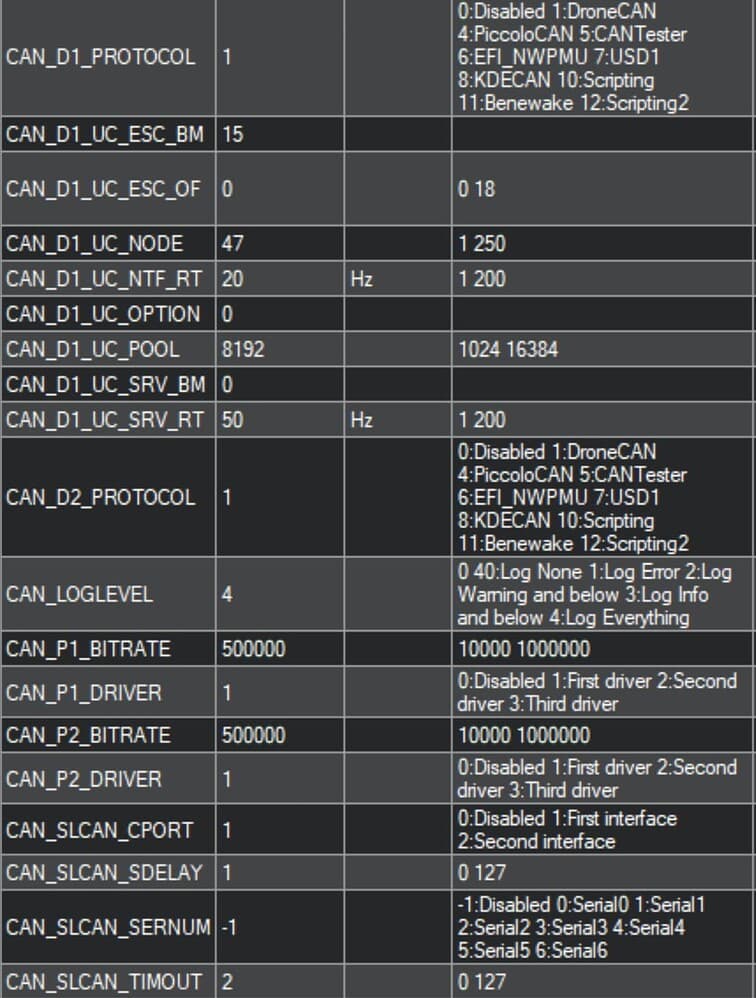
I would like to transfer the data of the RC and the motors via CAN bus from the Cube Orange to a second control unit. Unfortunately, when I activate Can Bus, I do not get the desired values. Does anyone have experience with this or can help me?
With the TTC you can read out many CAN bus. But what I wonder, what parameters do I have to set so that I can output the PWM from the remote controller via CAN?
If this is not possible, can I at least output this as PWM?