Hello everyone,
I am launching the SITL simulator and MAVProxy with the following entrypoint for a Docker container:
# launching SITL...
sim_vehicle.py --vehicle Rover -I0 --no-rebuild --no-mavproxy &
# launching MAVPROXY...
mavproxy.py --daemon --master=tcp:127.0.0.1:5760 --sitl=127.0.0.1:5501 --out udp:0.0.0.0:14552 --out=udp:mavros:14550 --out=udpin:0.0.0.0:14551 --state-basedir=$HOME/rover --streamrate 10
The container works fine, a computer with Mission Planner can connect to port 14551 on LAN with the host IP address and MAVROS (another container of mine) can connect to 14550. But also there would be a need of a third way of connection, with QGroundControl as well. I would use 14552 (or 14550-14551 if possible) for that to happen.
The connection is configured like this on the Comm Links tab in QGroundControl, I use 127.0.0.1 because this is the host PC running the SITL container.
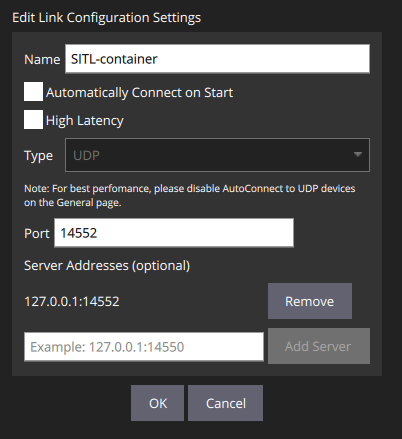
When I tried to connect, there is a popup window saying that “Error binding UDP port: The bound address is already in use”, and on the main screen the status is still Disconnected.
Please if you have any idea what can go wrong, feel free to tell me. I am currently out of ideas.
Thank you!