Hi, I’ve installed this 4in1 ESC, connected to my Pixracer, calibrated with MP selected ESC Type: Normal. It’s working, no problems detected. My question is: What will I win running BLHeliSuite to calibrate this ESC? Or even to flash the firmware? Thanks. Chris
Hi chris, i need you help for setup a mb 1242 and 1202 on pihawk if you can
@Dave84 hi, maybe you can open a dedicated topic for this…
First of all, you cannot use BLHeli suite to connect to the ESCs via the CleanFlight 4in1 pass through because ArduCopter is not CleanFlight, BetaFlight, or iNav so you are going to have to use an Arduino to flash firmware to the ESCs, or to change any settings.
thanks, I know how to connect it. the question was: What will I win running BLHeli Suite? will this highly improve the esc behavior?
For me the jury is still deliberating.
When I look at the physics involved, my mind says no, particularly when you are swinging large props on low Kv motors.
BlHeli is all about getting “instantaneous” throttle response from high Kv motors swinging “small” (6" or less) props with 2000+ Kv motors. In a racing flight regime this translates to having an aircraft that is fast, agile, and wins races…
A case in point is my 250 Nighthawk. Initially I was using ESCs that used firmware that was “based on BLHeli”. Even though the aircraft was nimble and quick, it flew even better when I switched to ESCs that actually ran real BLHeli firmware.
On the other hand I have 3 Pixhawk aircraft that use 740KV, 530Kv, and 350Kv motors swinging 1355, 1555 and 1655 props respectively. These aircraft are using Hobbywing X-Rotor 40A OPTO ESCs. These aircraft are built for stability, lifting capability, and long flight times. As far as I am aware, switching to ESCs running BLHeli offers no real improvements and would only serve to lighten my wallet.
Another point to consider is how a racing FC takes advantage of BLHeli as it relates to processor loop time, gyro sampling rate, and noise. Read this: Oscar Laing: Looptime.
1 Like
thanks for the answer, I use also a quad with 1355 propellers, and I’m using 4in1 esc only as an easiest simplest and lightweight way to build the drone. Not using the BLHeli options that should be, from my point of view, only very useful for racer drones.
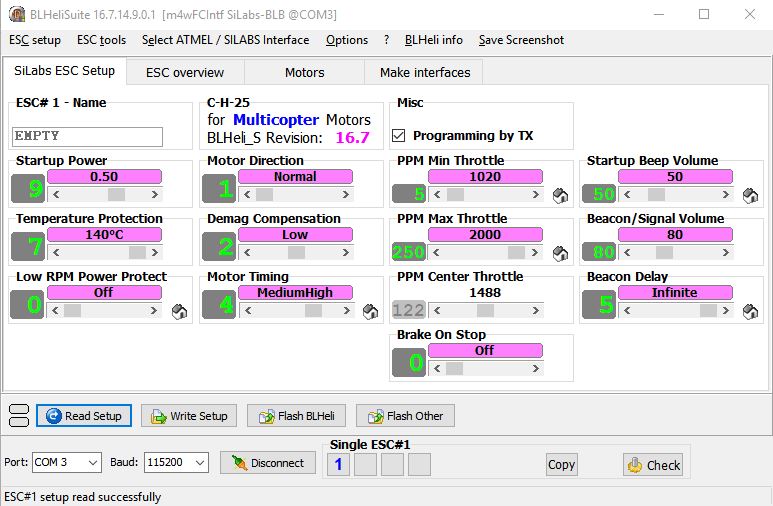
It will allow you to set various parameters that may improve motor operation but chances are the default configuration will be fine. I did find that on my last BLHeli_S ESC’s (I use BLHeli/BLHeli_S on all my craft) that the Low RPM Power Protect was ON which was a problem with the 3508-380kV motors on that craft. I tweaked the motor timing also and always use it to set the motor direction so I can just solder up the motor leads (I don’t use bullet connectors) w/o worrying about this. I don’t bother with Transmitter based calibration, I just set the Min/Max throttle range in the Suite and then tweak the motor parameters in Arducopter to suit. It has never been a problem.
I use a cheap Naze32 with Betaflight for passthrough just for config purposes but I hear that the Devs will add Arducopter passthrough when the ChiBios based release comes out.
If you are interested attached is the config for some Spedix HV BLHeli_S ESC’s that work well on the above mentioned motors.
1 Like
thanks for the in-depth information!