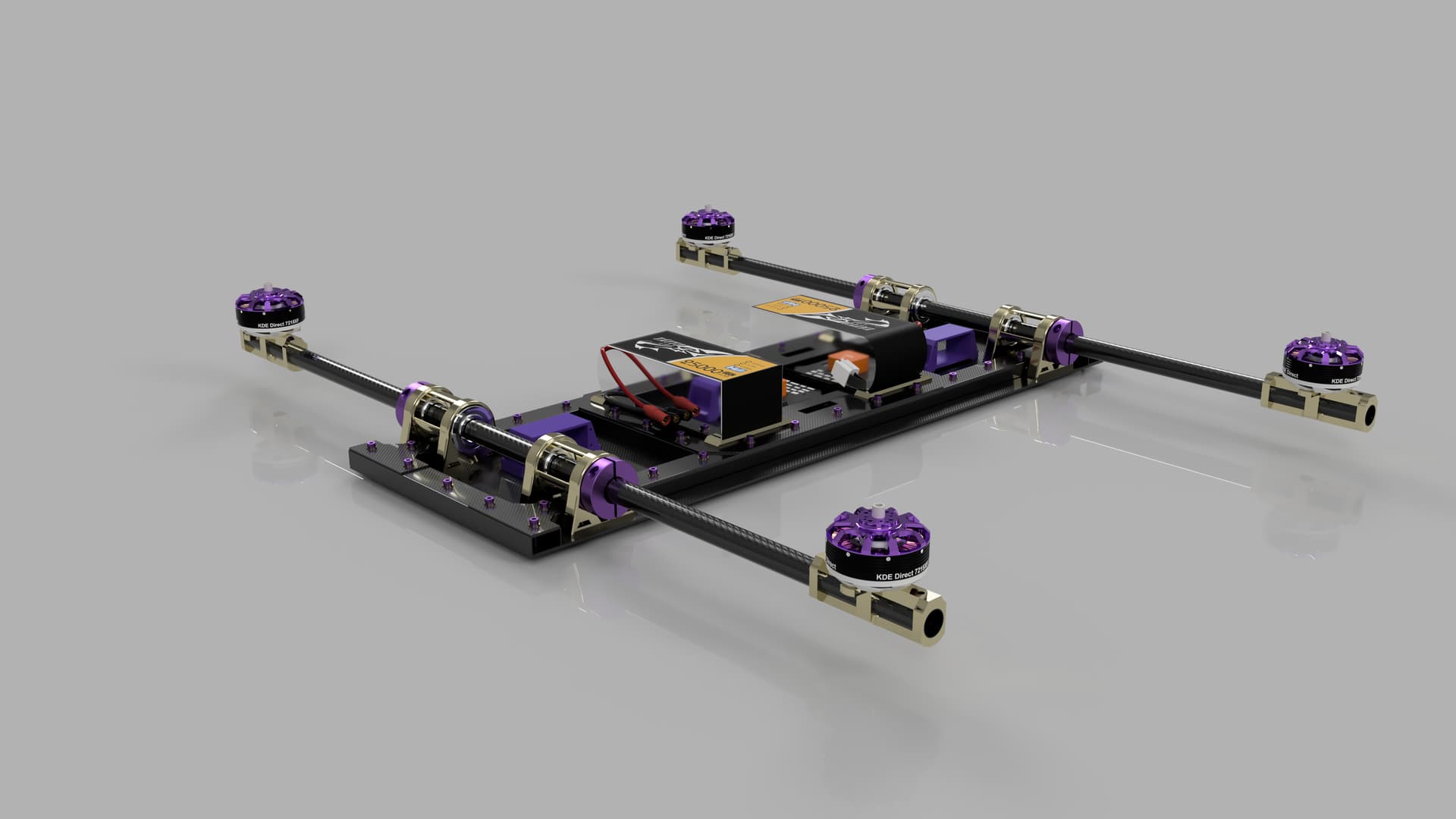
I am currently looking into modifying the CubeOrange firmware to allow the motors to tilt while in flight using Arducopter. However, I believe it may also be possible to use a modified configuration of ArduPlane to achieve this. Any feedback is appreciated. Thank you!
This project has been on hold for a while, but I’ve recently gotten back into it. I’m still in the process of figuring out how exactly I want to pull this off. As it stands, it looks like one has to heavily modify Arducopters firmware, as many of the functions in Arduplane require, well, the plane part. I’m going to keep updating this thread as I make progress.