Just getting started- heading through the configuration link right now: Connect ESCs and Motors — Copter documentation
And…
Servo — Copter documentation
It shows an Initial Setup screen with Motor Test that you can test motors A B C or D. I managed to find this on my Mission Planner, and on the Data page, I have a Servos/Relays page with Servos 5-16 and Relays 0-6. Trying to figure out how to turn on servos that I have connected to my Matek F405-HDTE that are on channels 1-8?
I found how to configure Skid Steering, where it says to configure servo1 for left throttle and servo3 for right throttle:
https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html?highlight=skid%20steer
I am trying to make a boat, with 2 motors that use PWM and a direction line using DC motors and an L298N H-bridge. The flight controller we are using is a Matek F405-HDTE, and relays are mapped to unused servo channels somehow (I have 2 connectors, for servos/motors 1-8).
I am baffled by how to relate the servos on Mission Planner to that of the Matek? The Matek is simple, but the Mission Planner is a total mystery. I can’t even figure out what Frame I am supposed to set in Config, because it is just helicopters. Where are the first 6 servos that are missing in the Data screen? How do Motors A-D get mapped?
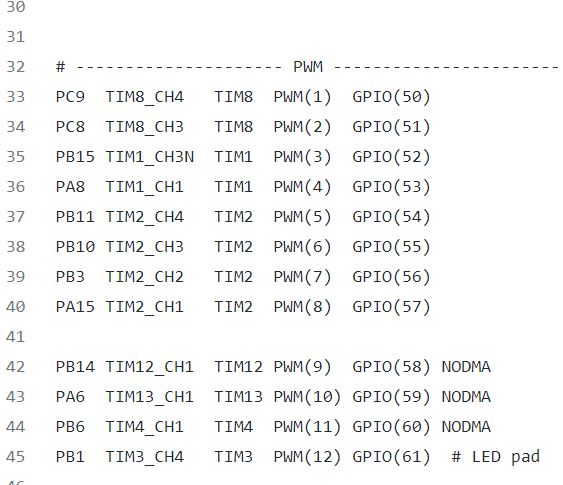
Furthermore, Matek says I can map out relays and servos to any of the servo channels as GPIO.
https://ardupilot.org/copter/docs/common-relay.html
If I use Servo 1 and Servo 3 to drive my motors, can I use Servo 2 and Servo 4 for direction? I set the motor type to “[Brushed With Relay]” is for brushed motor drivers that use a [relay pin] to indicate whether it should rotate forward or backward.
I also want to map a random servo that I can connect for alternate use (0-360 degrees) https://www.amazon.com/gp/product/B08743N181/ref=ox_sc_act_title_2?smid=A22NPL1KB8AOV0&psc=1 and a relay to operate a pump.
So I am totally able to get everything working how I like using an Arduino, and I know where to wire things on the Flight Controller, but how to configure what I want using the Mission Controller interface to the hardware is a total mystery to me. I have been looking for a good reference, but I am totally lost.
Any help for an ArduPilot noob would be appreciated!
TIA