When I connect my vehicle to MP, I have this error :
“25/07/2023 10:46:28 : Config Error: Baro: unable to calibrate
25/07/2023 10:46:28 : Config Error: fix problem then reboot”
But, I have no idea in wich way I can fix it.
Please let me know any possible fix for my problem.
I’ve just noticed that I’ve made a mistake. The compass is made to be connected to a CAN but I put it on an I2C. Is it possible to use it with a UART? I’m not aware of any can on my FC.
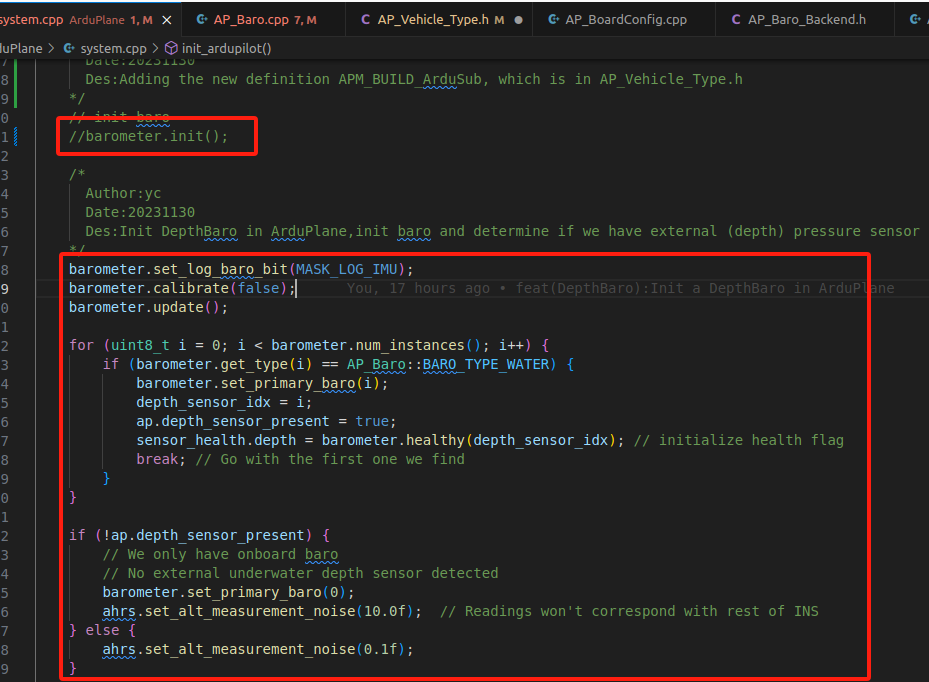
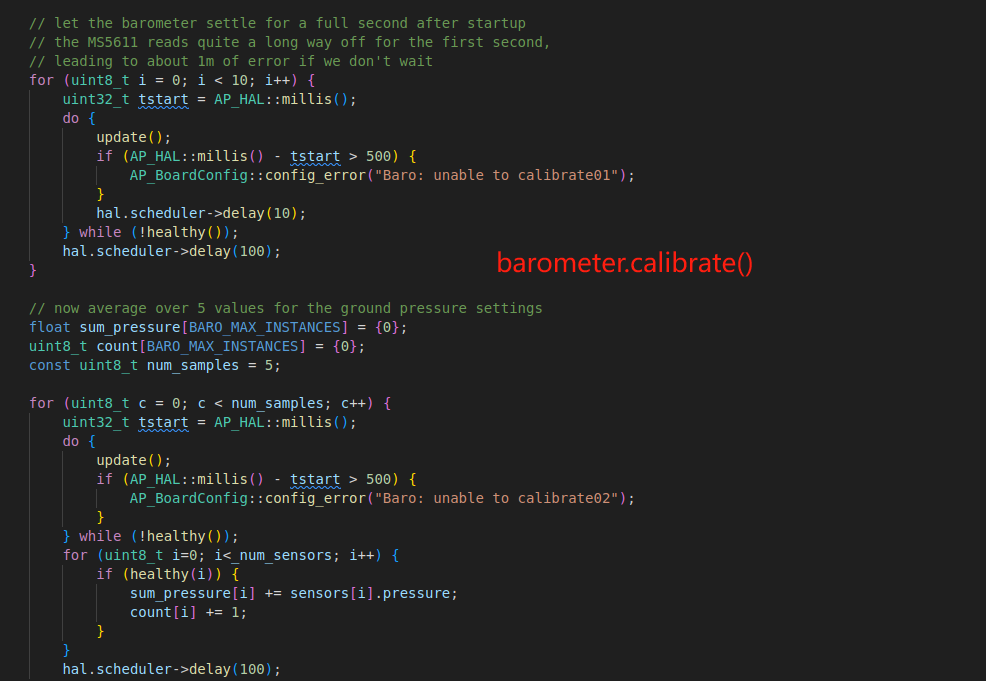
Hi,sir!I get the same problem which you met.The mission planner prompts me:Config Error:Baro: unable to calibrate. I changed the ArduPlane code baro.init() in system.cpp.My goal was to be able to initialize the bathymeter in plane’s code, so I copied the relevant code from Ardusub as following.When i built it then wrote in CUAV-X7 board,it prompts me:Config Error:Baro: unable to calibrate.Looking forward to your reply.