A quick post before bed:
Apart from using tail assemblies, this German site has vp assemblies in various sizes
http://www.ramoser.de/home_e/varioprop_e/varioprop_e.html
DDVP drives are fairly easy to make too. Just have to make a longer shaft for your motor. Air hardening drill rod works good to make a motor shaft.
Very cool. I was planning to do the same thing. Just have to pick out the right motors.
That motor is a Tiger 3508-630. The shaft diameter has to be machined to fit the bearings in the motor because the shaft diameter for the slider/pitch assy is larger than the bearing ID in the motor. You need to machine a small flat in the shaft for the grub screws on the rotor bell, and a small circlip groove on the base of the shaft for the circlip that retains the shaft in the rear motor bearing.
The air hardening drill rod is pretty hard but can be machined a couple mm with emery cloth in a high-speed lathe, or use a crankshaft grinder. For folks that don’t have the machining tools, a machine shop can do it in few minutes and shouldn’t cost too much if you take the stock shaft along so they have the dimensions that it needs to be machined to.
Is it easy to get custom parts made if you don’t have the access or training for machine tools. I can provide either paper or cad drawings. Sorry if it’s off topic but I’m interested in the project. What is DD. I got the fixed vs variable pitch part. I was to build a central motor VP quad just for fun. I’d like torque tube drive but need a few custom parts.
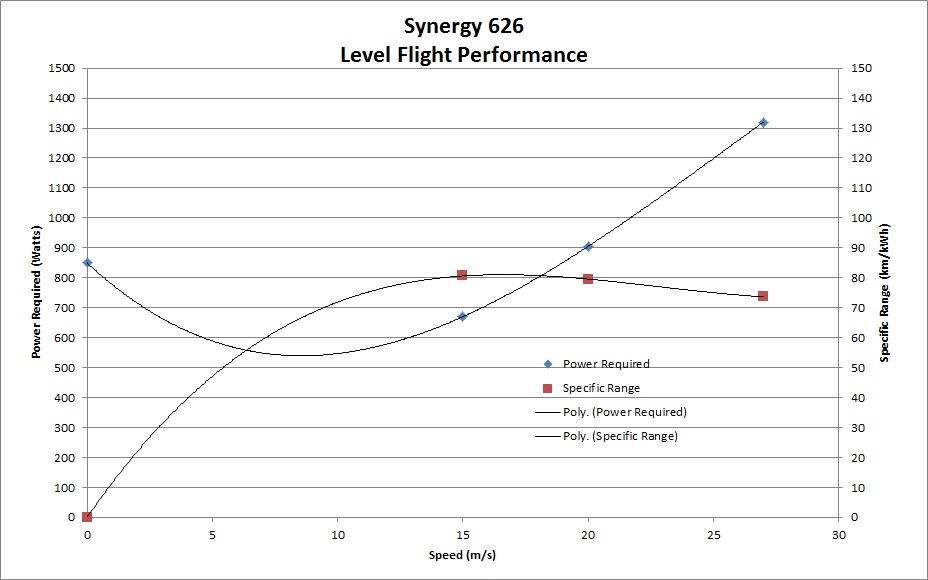
@bnsgeyer I’m curious about your Level Flight Performance Graph. Are the points on the graph the actual test points, and the rest of the graph extrapolated?
I’m comparing to test data from my Synergy 626, which is about the same size heli (maybe a bit bigger because of 1,390mm main rotor). But the takeoff weight is about the same, 14.8lbs (6.7kg) for the 626 carrying 6600 12S. My hover power is 850 watts (1.14hp), or ~127 w/kg of aircraft weight @ 1,630 rpm.
Cruise power at 15 m/s is 670 watts (~100 w/kg), 20 m/s is 905 watts (~135 w/kg), 27 m/s is 1,320 watts (~197 w/kg).
Fuel consumption (mileage) is 80 km/kWh @ 15 m/s, 79 km/kWh @ 20 m/s, 73 km/kWh @ 27 m/s.
My numbers were gotten from the Castle ESC’s internal logging, which may or may not be 100% accurate. But I think it’s at least as accurate as the Pixhawk PM’s, if not more accurate.
I made several modifications to the heli to get those numbers
- vertical stabilizer adjusted to provide all the yaw authority for forward flight
- reduce tail drive ratio from 1:4.5 (7,330 rpm) to 1:4 (6,520 rpm)
- replace stock 96mm tail rotor blades (321 fps blade tip speed) with 106’s (308 fps blade tip speed). The bigger tail rotor blades are more power efficient, better yaw authority, and less driveline losses running at lower rpm.
So while the performance curve is pretty flat from translational lift to 20 m/s, it starts going backwards at cruise speeds much higher than that. It will be quite interesting to see if the compound design is only suitable for getting higher cruise speeds without RBS problems, or if it is actually more efficient than a conventional heli. I could not find any fuel consumption vs cruise speed numbers for the EuroCopter x3 concept aircraft to compare with conventional.
Edit:
Had to double check my math because I took the numbers off my spreadsheet that never actually figured out watts/kg or fuel mileage. Had to make a correction for a typo on the 27 m/s cruise, and the rotor diameter. It was 1355mm stock, with the 626 blades it is 1,390mm.
Yes. The points on the graph are actual test points. And the power data was taken from the internal logging of the Castle ESC.
I hadn’t played much beyond the initial redesign to 4 bladed rotor to look at high efficiency. I was worried about yaw control with the smaller tail rotor blades. So I didn’t want to bring the rotor speed down too much. Also I may have been premature in my concern of settling with power. I like the way you judge your minimum rotor speed based on hover collective pitch setting. In full scale helicopters we use a metric Ct/sigma which I show in the slide show. They know for full scale helicopters where this should be to keep away from blade stall but I’m not sure how well that translates to model scale. So I’m assuming that you don’t have to be cautious with your approach to hover, worrying about the aircraft settling as you pull into hover. I distinctly remember that happening quite a bit with my two bladed version.
So to compare our power required, we would have to be at the same Coefficient of Thrust (Ct). Mine is slightly higher (0.0028) to yours (0.0025). It essentially generalizes your weight with blade length, rotor speed and air density so you can compare performance. I’m not saying that mine is more efficient or not but to compare apples to apples, we should be looking at aircraft at the same Ct.
So for the performance numbers in your post, was that using the stock blades (1355mm) or the 1390mm blades?
Right, and that can depend on airfoil type used too. If you remember, I tested four different types of blades I bought at IRCHA, specifically to test for power efficiency. I am, of course, flying the ones that had the best numbers (Rails).
Those numbers are with the 1390mm main rotor diameter and 275mm tail rotor diameter.
Quotes out of order here, but no. I have zero settling with power problems with the 626. It is the one that I was able to recover with, testing the inverted flight code in 3.6-dev. When the heli flipped over, there is no collective lead-in built into the code so it falls like a rock when it rolls 90 degrees. Despite the fact that it is a very poorly implemented roll with a helicopter, the 626 handled it fine at full UAV weight.
This works very well because any airfoil has a most efficient angle of attack range. You want to be hovering at the upper end of that range, and cruising at the lower end.
Certain the blades will change the performance. I’m just saying that the way to compare aircraft performance goodness would be at the same Ct. There are many other things that can be baked into the design that would make one aircraft excel in performance compared to another, airfoil selection being one of them.
Correct. I added comments to my previous post to address some other questions or comments you made.
I don’t know how to calculate or measure the thrust coefficient of my main rotor.
Coefficient of Thrust = weight / (air density * pi * (rotor speed)^2 * (blade radius)^4)
so for your aircraft it was
Ct = 14.8 lbs / ( (0.00237 slugs/ft^3) * 3.14159 * (170.7 rad/s)^2 * ( 2.28 ft)^4 )
Ah, OK. I wrote that one down to remember in my Important Notes (actually copied and pasted into my Important Notes in my computer, but same thing) ![]()
I think you may have been running too low of a headspeed for the weight and type of airfoils used. My opinion with UAV heli’s is that people get carried away with low headspeed, just to get a few extra seconds of flight time. I like to shoot for a compromise between flight time and performance. So I have my governor set up to run 390 fps blade tip speed for lower speed flight (hover collective around 7.2 degrees). 420 fps for high-speed flight (hover collective around 5.5 degrees). I’ve found that the higher headspeed is a plus for handling qualities and stability in high speed flight, or windy, turbulent conditions.
Our RC heli’s have quite low disc loading compared to even light utility helicopters. Light utility class is usually 2.5 lbs/ft^2, or more and typical blade tip speed of 550 fps. Heavy lift heli’s will run up to 14 lbs/ft^2 and 700 fps. The largest and most powerful heavy-lift helicopter on earth, the MIL Mi-26 Halo, has a takeoff weight of 123,450 lbs with a main rotor area of 8,657 ft^2, giving 14.2 lbs/ft^2 disc loading @ 132 rpm, or 725 fps blade tip speed.
I think the compound designs shooting for higher flight speeds are going to have to keep the headspeed up for decent handling qualities. At 420 fps the blade tips are traveling 286 mph, giving relative speed of 186 mph @ 100 mph flight speed, which even in wind should not reach the critical AoA for the airfoil and have RBS problems. But whether or not the handling qualities, and tuning of the heli, will be adequate at those flight speeds for it to remain stable is still to be tested. I have watched the Speed Cup competitions (and participated in a couple of them), and 130 mph with a stock 600-class machine is easily attainable with excellent stability. But the headspeeds used run the blade tips at ~550 fps (light utility heli class). Part of that is to get the power and acceleration for the run. But a big part of it is stability too.
This will be a quite fun thing to test.
So I did a quick plot of your data. It would be helpful to better define your bucket airspeed to have data at 5 and 10 m/s. So best range speed is roughly 16 m/s and cruise (defined as 99% max SR) would be probably closer to 18 m/s. Pretty cool!
{kind=link}
Remember that the advantage of using a compound is not using the main rotor for propulsive force. then adding a stub wing to offload the main rotor. This allows the thrust on the main rotor to be much less thus lower AoA on blades. So you can bring the tip speed down and thus lower the profile power required. If we have to run as high a head speed as conventional helis then we aren’t going to have any better performance.
Yep. That is just about exactly the real world numbers that it achieves. It’s fight time is 25 minutes @ 15 m/s with 6600 12S and 39 minutes @ 15 m/s with 10,000 12S. I can flight plan a 12 mile auto mission for it carrying 6600 12S and it comes in with a little reserve. It can fly 18 mile auto mission with 10,000 12S @ 15 m/s.
I did not ever really take readings at 5 and 10 m/s because I don’t normally fly at those speeds. But from the logging, it’s actually pretty flat from about 5-6 m/s to 15 m/s. As soon as it enters translational lift the power drops below 700 watts.
The big question with a compound is how much of the power consumption in the thrusters is going to be saved in less drag on the main rotor, and tail rotor of a conventional? This is where DDFP might shine. They only use the power required to create the desired thrust.
I don’t know if that’s true or not. If the blades are running at lower AoA then should be able to run the same headspeeds at lower power requirement. And the disc should be more responsive to cyclic because it’s not loaded as heavily in high speed flight. Just thinking it thru. Disc loading plays a role too.
That’s why it’s going to be really fun to test.
What I need to do is buy one of those reversible ESC’s and bench test a DDFP drive with ~10" props on it to see how fast it can respond and switch directions. While I didn’t have good luck with a DDFP tail on a 600-class heli before, I was only using one DDFP drive running one direction. It’s possible that twin drives, reversible, might actually work on a 600-class. I really need to test this on a homemade yaw table to see what kind of response it has. A typical tail servo like a Futaba S9254 can change thrust directions from full one way to full the other in 100 ms under load.
Hover is not where I’m worried about. It’s yaw control in flight. So I could make a yaw table, mount the Pixhawk on it, mount my twin DDFP drives on it, fire up the drives in a forward thrust configuration, and test the yaw authority by turning the table to see how stable it can keep the heading, and how fast it responds.
Most BL_heli race-quad ESC’s should have much better response than your standard airplane/heli ESC…and they’re pretty cheap too.
BL_heli also now has it’s own Chrome App, which makes configuration easy.
One of my vices/hobbies is flying racequads 
Part of the response time is in the motor and inertia stored in the prop too. I was spinning a 11" prop on the tail of the 600 when I tried it, and it was too slow for a 600. Works fine on a 500 with a 38" diameter main rotor and 9" tail prop.
Right. While there’s been some decent advances in that area on the racequad motors, those improvements have yet to make it to larger motors (and may not do so, as there isn’t a real need for it).