Hello, Im new in this community, hope I chose the right repository for mu question. I was making a canard type plane, with rear control surfaces as ailerons and the front two were configured as v-tail: pitch and yaw control at the fore, roll control at the aft. But after the second test flight, during which it managed to fly (with excessive roll but it doesnt really matter, easy fixable), when I gave a rudder input I received a beatiful but still undesired stall. I figured that with rudder input I receive a great loss of the lift force, therefore I receive flow disruption and fail into spin.
I decided, that the graet way to fix this problem is to decrease pids for roll, make my front surfaces as elevators, and to make rear ones responsible for roll and yaw control. But I have no idea how. I suppose the best option is to use differential spoiler servo function and adjust the direction, but it still controls pitch. How can I reduce pitch authority for spoilers or what is the best option for solving my task? Or how can I use v-tail mixing with 0 pitch, but roll-yaw control?
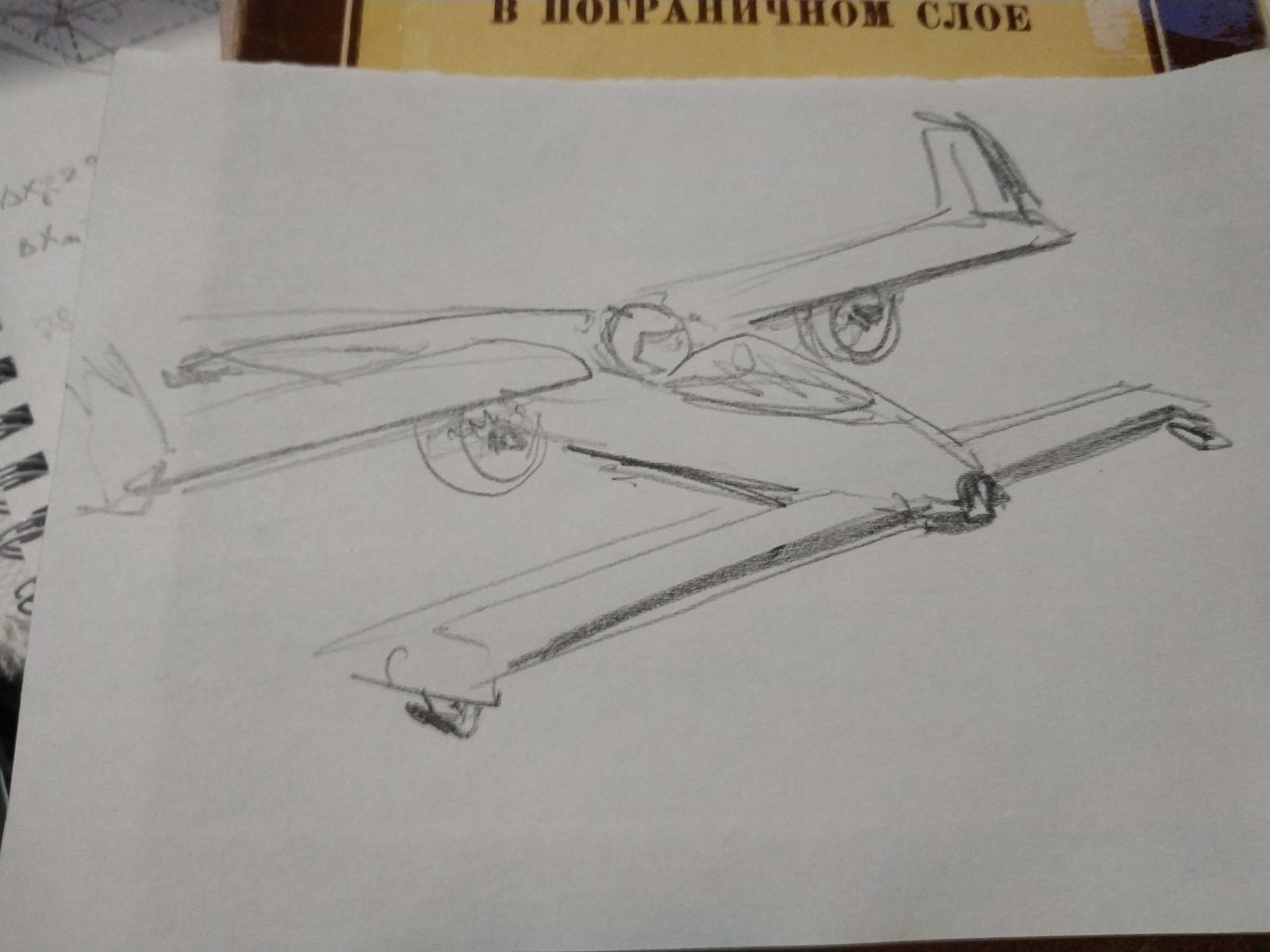
Please post some pictures of your airframe.
In principle having yaw control surfaces in front of the center of mass is unstable.
Have a look at this
https://ardupilot.org/plane/docs/differential-spoilers.html
You may be able to configure the ailerons as split elevons and then use differential spoilers for yaw control. You’d need to set up two control surfaces on each side though.
I’m totally guessing at this point, but since you are building a canard, you could turn down the mixing gain so there is very little or no pitch control in the elevons and then leave the forward wing for traditional canard elevators. This is all just an idea so I don’t know if it would work or how complicated it would be.
The next step I`m planning to do is to add cross-tail surfaces and make them as ailerons and rudder. But before that I need to figure out, how to do it with a simpler configuration.
I`m sorry if I missunderstood smth, but how can you adjust for a one surface 2 different servo functions at the same time? Thank you kindly for your advice
I think if you want yaw control from the main wing you will need to split the ailerons into two independent control surfaces and use the differential aileron set up I linked to above. With only one control surface on each main wing there would be no way to get yaw control without creating some kind of adverse roll.
But if I reduce the mixing gain parameter, doesnt it reduce the elevator output in fbwa at the same time? As I figured from the wiki, if Im willing to remove the pitch output in the differential spoiler I need to set the maximum value of the mixing offset and to minimize the mixing gain around 0.1-0.2. But at the same time I receive a weak pitch control with my elevator servo function.
That configuration likely is aerodynamically unstable or has marginal stability. You will need active stabilization in yaw axis or to preferably make sure your plane is stable.
Thank you for your tips, I adjusted pids for pitch, have made autotune in flight and it was stable.