I have a pixhawk 2.4.8, after the whole process of calibration and setup with the QGroundcontrol (in mac) I could fly a few days without any problem … then I make tuning adjustments (with APMplanner in mac).
As a result the pixhawk no longer flies, it has many problems of accelerometers and GPS … In a few words i try the 3 reset optionsBut that only establishes the basic parameters.
I assumed that after that I only have to load a new program with MissionPlanner like Copter V3.xx ?
Or I also need Generate a DFU file? and what is that?
If you just changed parameters you don’t need to reload a bootloader, the reset options you mentioned are enough. In any case, after updating the bootloader you only need to upload a new firmware, with Mission Planner for example.
Thank you very much for your support
The fact of mixing QgroundeControl and APMplanner really affected the board, changed just the parameters it was not enough.
I want to try this method
but it is more confusing:
Tell to download dfu-util tool for linux, then show this page that I do not understand anything at all. Which one do I have to download ?? Why not in the normal terminal??,… I can not understand wear is the “FMU-BOOT2 I have the V2.4.8 board,
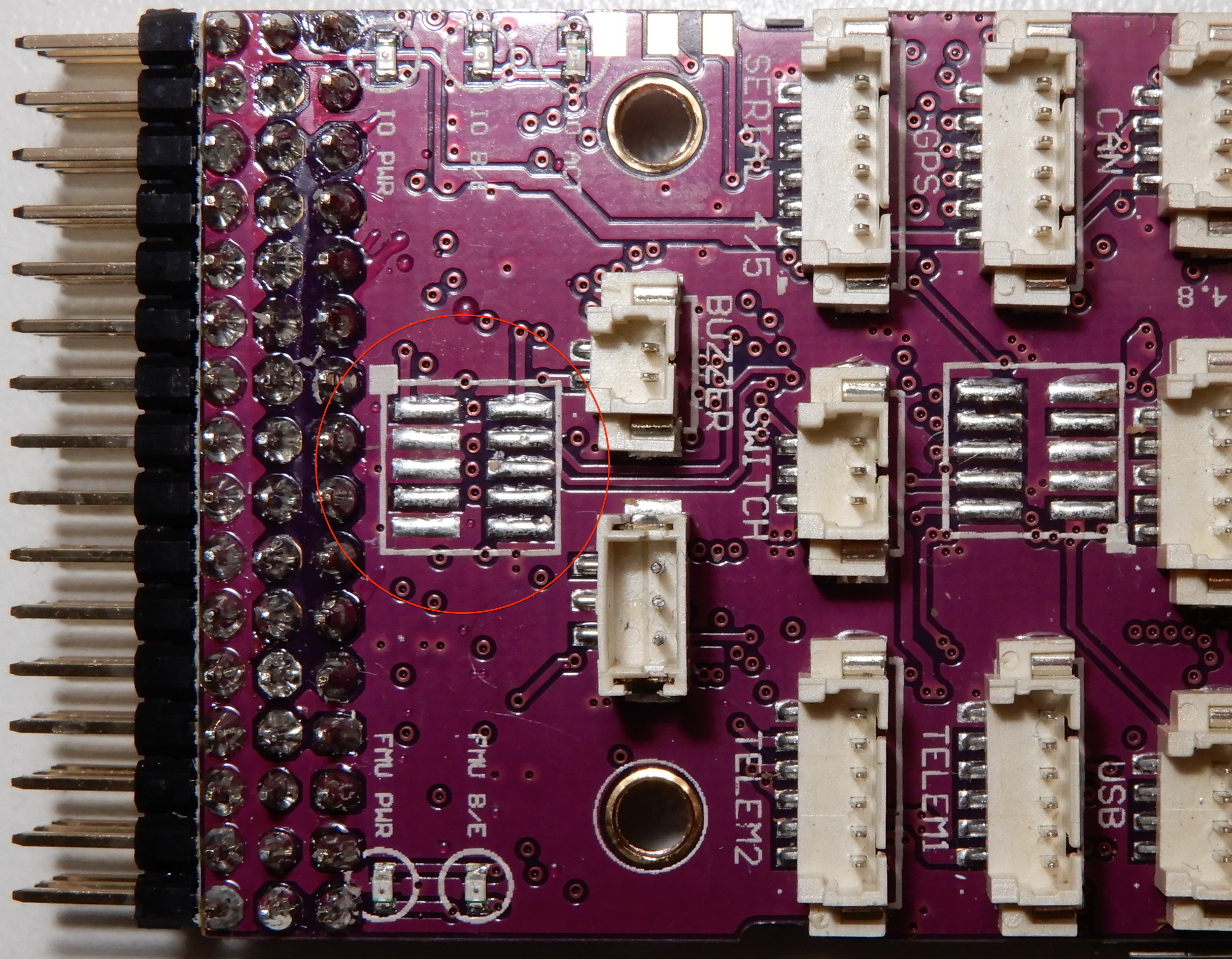
Thank you for looking at it as you just found a bug. The pad is actually between TELEM2 and switch connectors. I can see that you don’t have that in your clone board so I can’t really help you.
In any case, I still can’t understand why you are trying this. As far as I know both QGroundControl and APM Planner don’t change the bootloader. Also as long as you are loading ArduPilot using any GCS you can then update the bootloader from the NSH terminal - that should be done automatically when needed too.
I have “good” news, Mission Planner finally decided to charge the firmware to the board, I didn’t change anything, I just stop trying since yesterday, maybe it was the fact of restarting the computer.
Anyway I return to the problem I had before the bootloader,… Gps fails to fix and accelerometers have problems. in MP I get Error pos vert Variance … EKF GPS:No Fix, And looks upside down.
Forgetting the boot loader wat options do I have to solve this? I have the same problem on 2 boards
I think I already tried everything.
You should open a new thread in the appropriate category - there are categories for each vehicle and for each version. If you are using the clone I’m not sure there will be help available as clones are known to sometimes not work.