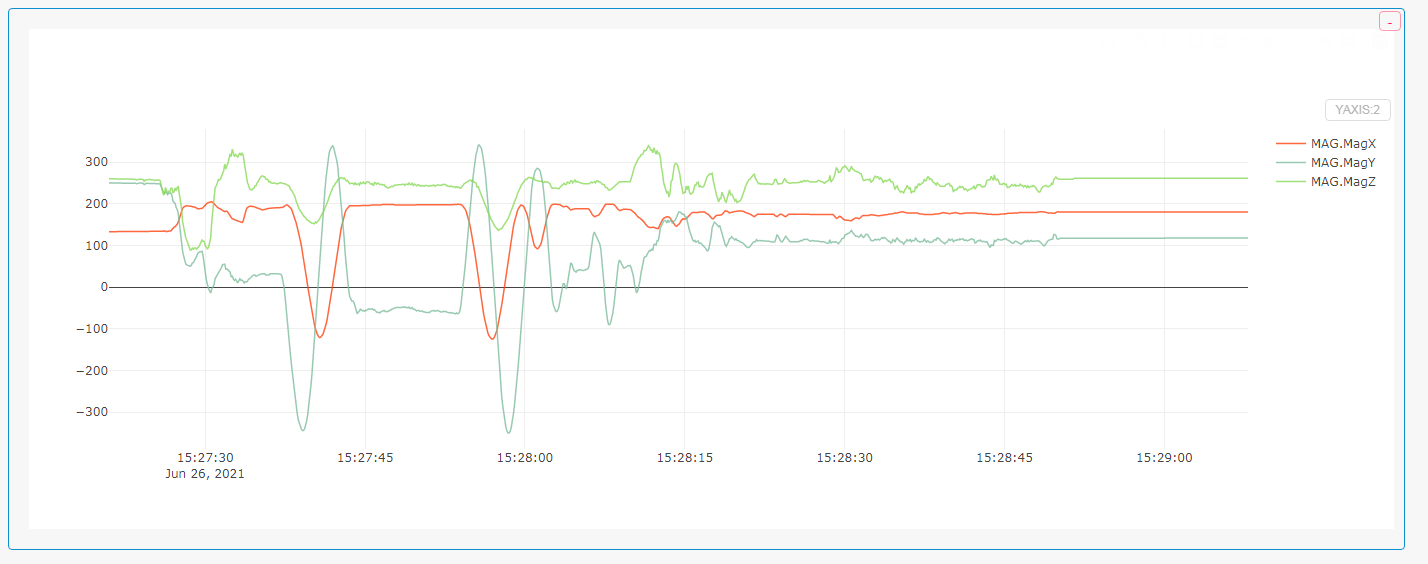
Compass variance too higher, but looking at the log data, it is have original compass data.
Version: Copter4.0.7
Compass: one UAVCAN Compass (RM3100), one Internal compass, Priority compass set CAN-compass
Log File: https://1drv.ms/u/s!AtY6Wtn1T07BbcOgJaWDxpjk3J0?e=cnZR4F
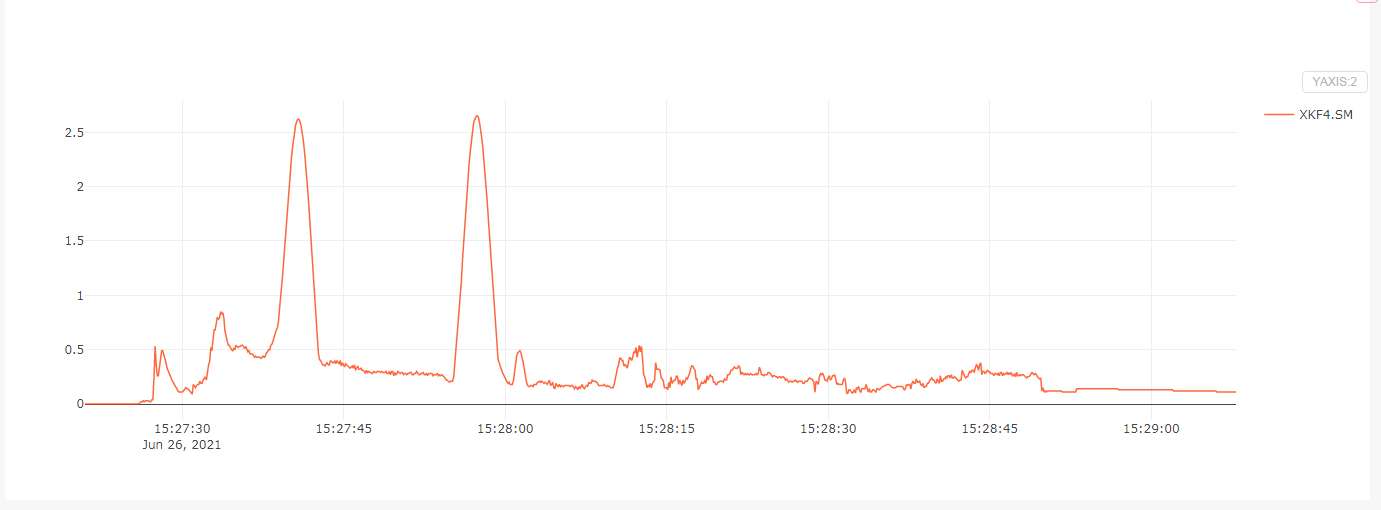
XKF4->SM:
Recheck your compass enable/disable/priority settings, or even send a screenshot of the Compass screen in MissionPlanner
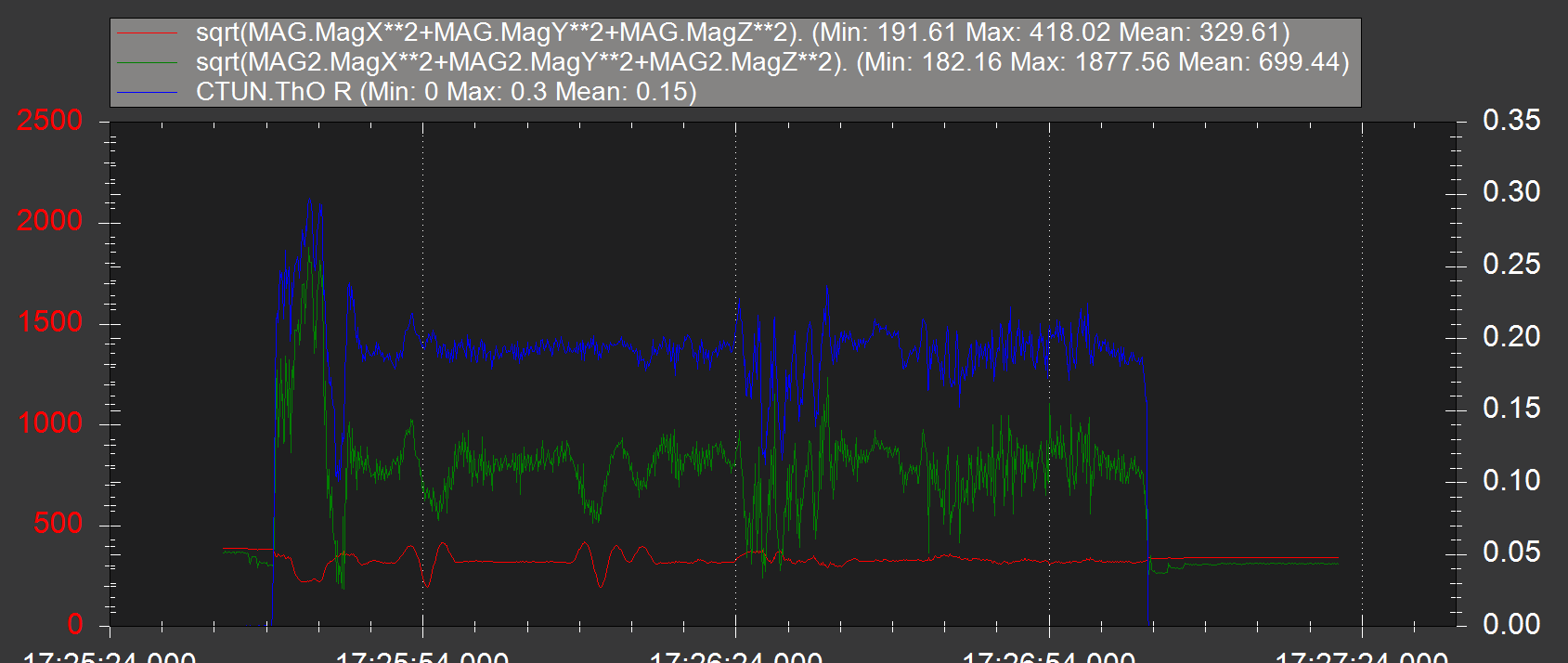
Compass 2 is suffering from interference by the battery,motors and ESCs but if that’s the one disabled it shouldn’t be a problem.
Params is right.
COMPASS_PRIO1_ID = CAN Compass ID
COMPASS_USE =1
COMPASS_DEV_ID=CAN Compass ID
I tried to repeatedly calibrate the compass, but there has been no improvement.
I think I may have calibrated it the wrong way.I’ll try again.
Thanks!
@xfacta
I use on-board calibration to do everything right, but there is a problem with using MP ground station field calibration. In this way, there is something wrong with the on-site calibration of the MP ground station.