Octaquod with Copter 3.5.5. One external compass mounted and enabled. Here is the .bin
Compass calibrated and motor/compass calibration using Throttle. First flight ok. Second flight the Compass variance jumped over 1.2 and remained there for the whole (short) flight
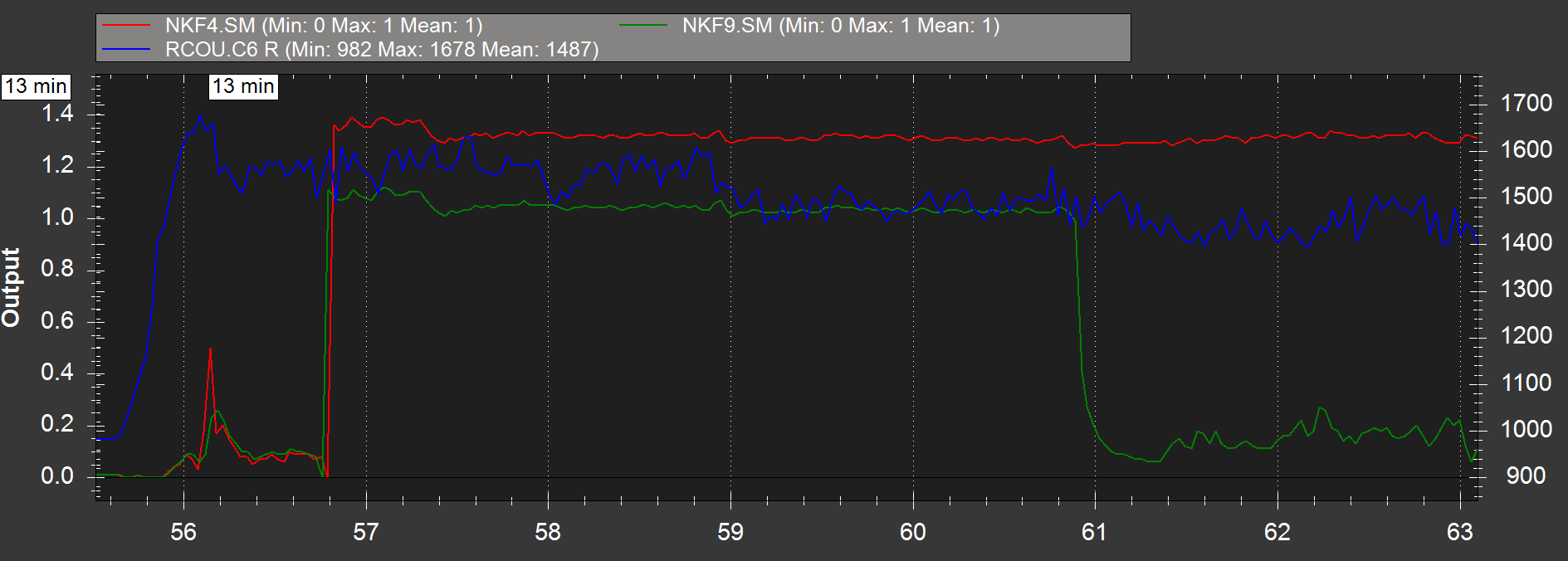
Here is the variance with the throttle (blue)
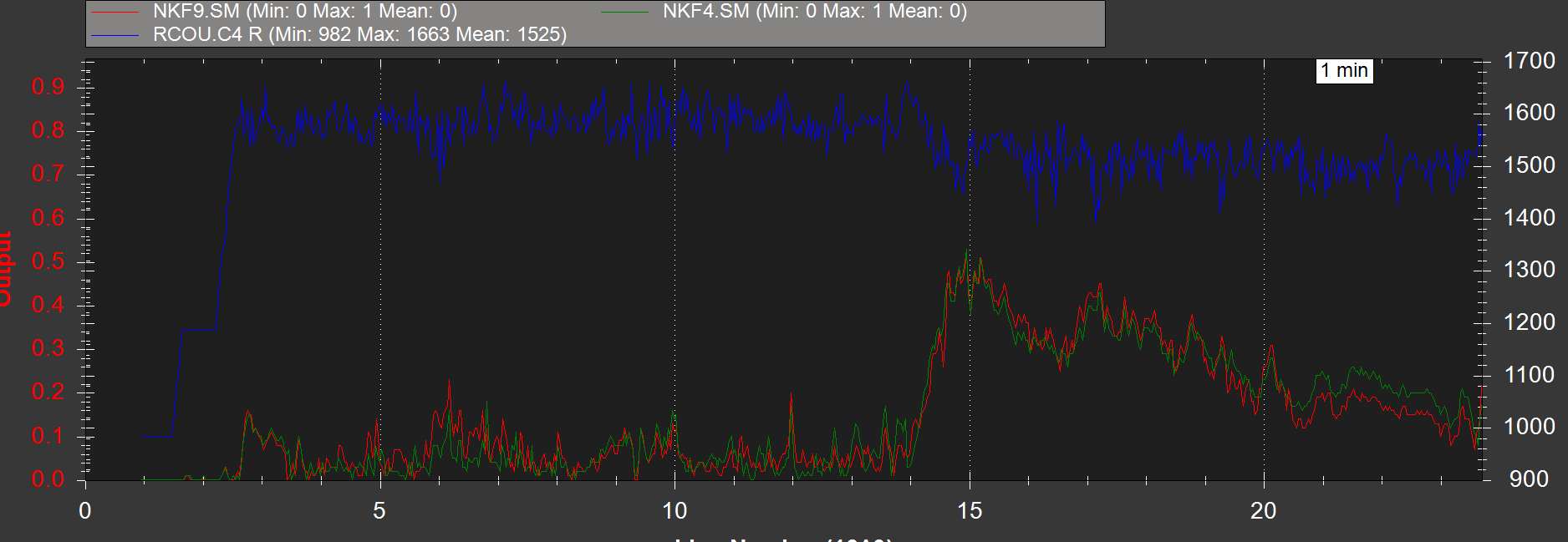
After landed I simply disabled the current sensor (doesn’t make sense) and next takeoff was ok:
Any idea how can that happen?