After a couple of successful manual flights I decided to try a simple auto mission with my quadplane. It took off fine, and heading to waypoint one where it began to circle a few times and then headed off a random direction. It then turned around and came back to the way point where it began to circle again. On the second circle it banked much too far and stalled. I heard the vertical motors come on but it still rolled over and dropped out of the sky.
I noticed a lot of ‘compass variance’ errors. I’m confused by this as I only have one compass enabled. Also, when repairing the plane I noticed that if I turn the external compass the HUD in Mission Planner does not reflect any movement but if I turn the Pixhawk itself then it does. If I’m using the external compass then isn’t this wrong?
Here’s a link to the log from the flight. Any help would be most appreciated.
post 6 of the following link is a crash analysis by tridge that may look like to yours
Nevertheless, pitch and roll attitude estimation are very good and we can only notice yaw discrepancy from 480s.
Your Airspeed disagree strongly with GPS speed but you have airspeed disable.
I tried some time ago to fly auto without airspeed and I found that trim_throttle and trim_arspd_cm must be carefully tuned and matched. You have trim_throttle=20 which is probably too low to fly at 20m/s. If you look at ctun_throut you will see trim_throttle should be around 50.
So, you crash could be a stall or a compass problem or both.
I think the first yaw input is accelerometer sensor, compass and GPS heading are used to corrected accelerometer drift.
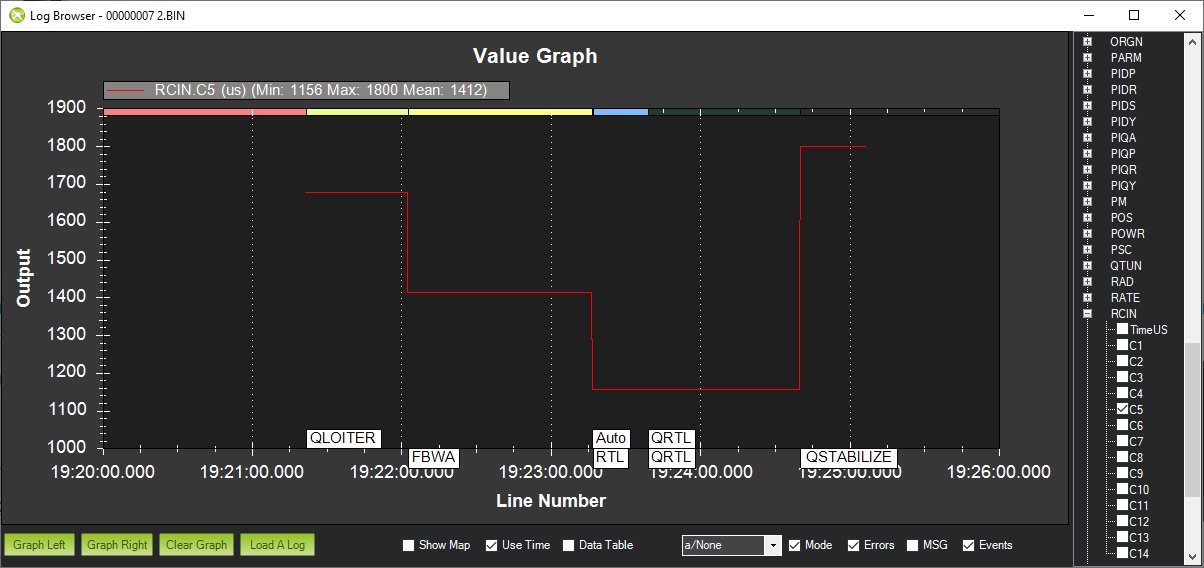
It looks like you had an RTL command (or two) right after you envolked AUTO mode. This probably mucked everything up. The question is where did the RTL command come from?
The RTL didn’t come from your transmitter, which is a common problem when using a knob to change modes. The mission looks like just a VTOL_TAKEOFF and WAYPOINTS. Perhaps there is still a failsafe that I haven’t spotted.