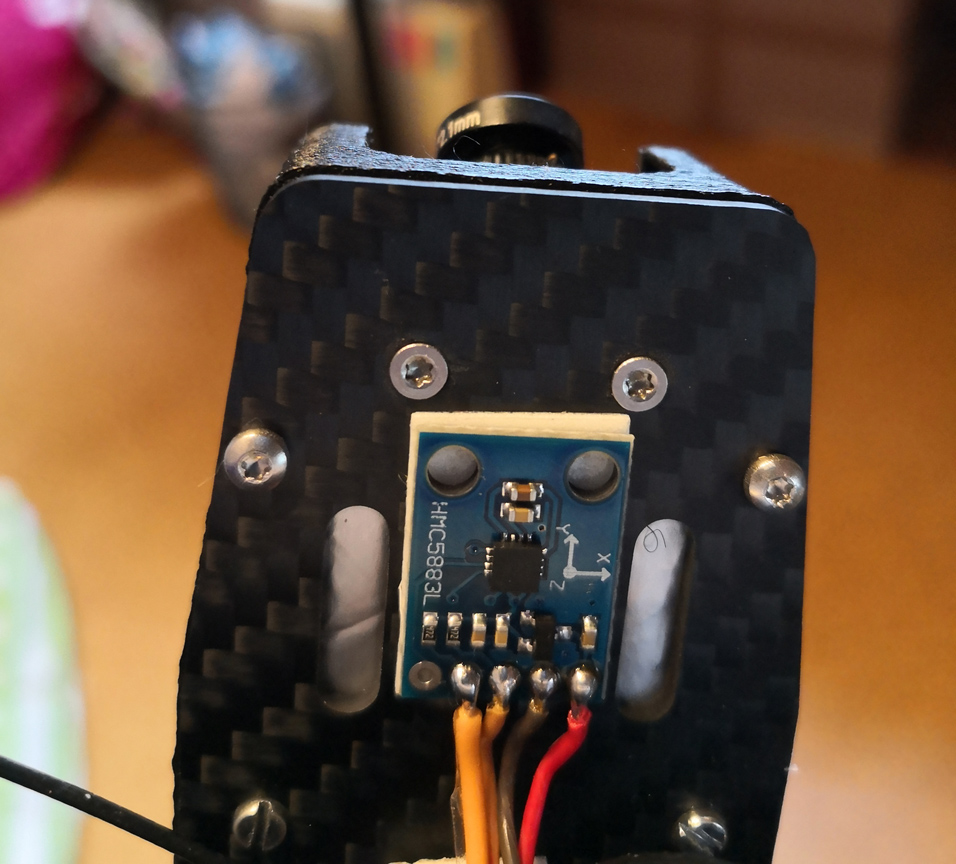
This page says: " If the Magnetometer board is mounted in its forward facing direction (Drone logo on the tab facing forward and in the opposite direction of the Y arrow) the (COMPASS_ORIENT ) parameter will need to be set to (Normal) or “0”."
–> Y should be facing rear, and X should face left.
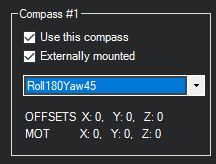
But I also wonder what I need to set… The value that I enter in this dialogue box - does it indicate how I rotated the compass while mounting, or does it indicate how the compass should be rotated back from its mounted position…?
And do I need to reboot / recalibrate the compass to see any effect in the HUD…?
And finally, any idea on what to enter in the above box for my orientation?
Northern Hemisphere: - Z-component should be positive - when pitching the vehicle down, the X component should increase in value - when rolling the vehicle right, the Y component should increase in value
Southern Hemisphere: - Z-component should be negative - when pitching the vehicle down, the X component should decrease in value - when rolling the vehicle right, the Y component should decrease in value
Worst case, just try the multiples of 90° until you get the correct response per the above link.
Because this happened all the time, I decided to change to inav firmware. In inav everything instantly worked (including the compass), so I am using this firmware. It’s a bit sad for me, because I would have preferred ardupilot, but the compass behavior was strange.