Firmware versions 4.2 and prior can use a CUSTOM (100) rotation to set the COMPASS_CUS_ROLL/PIT/YAW angles for Compass orientation.
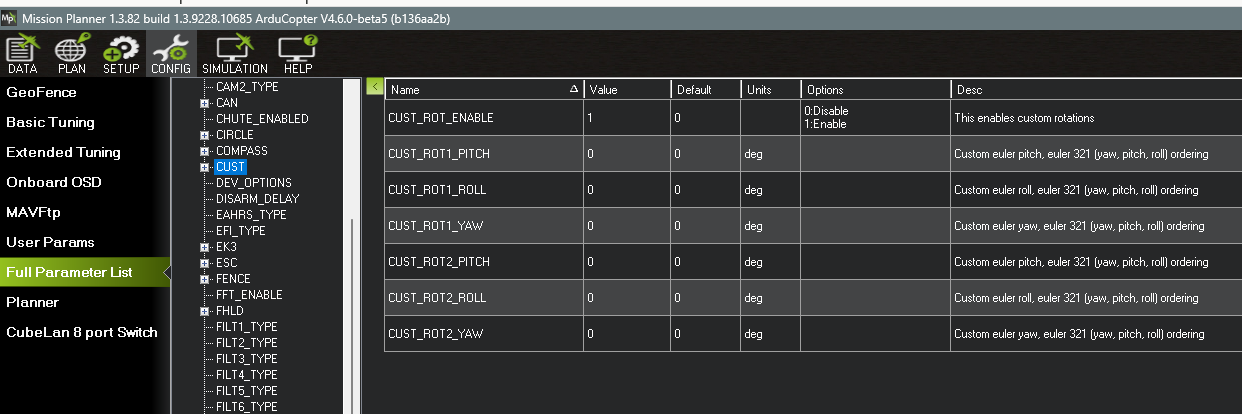
Later versions provide two general custom rotations which can be used, Custom 1 and Custom 2, with CUST_1_ROLL/PIT/YAW or CUST_2_ROLL/PIT/YAW angles.
So i set COMPASS_ORIENT=101 i.e. Custom 1, now how can i set CUST_1_ROLL,CUST_1_PIT and CUST_1_YAW as these parameters are not listed in mission planner.