Dear community,
i use ArduCopter V3.4.6 on a 5kg Hexa-Copter and did a couple of test flights after compass calibration on a wide farming field with no obvious disturbing items around. The copter did well in all of the six flights, but from day 1 i used to have large compass offsets in onboard calibration method. Even though it finishes successfully each time the values might be too critical and also the AutoAnalysis says so.

"Test: Compass = WARN - WARN: Large compass offset params (X:-151.84, Y:-169.73, Z:-292.02)
WARN: Large compass offset in MAG data (X:-151.00, Y:-169.00, Z:-292.00)
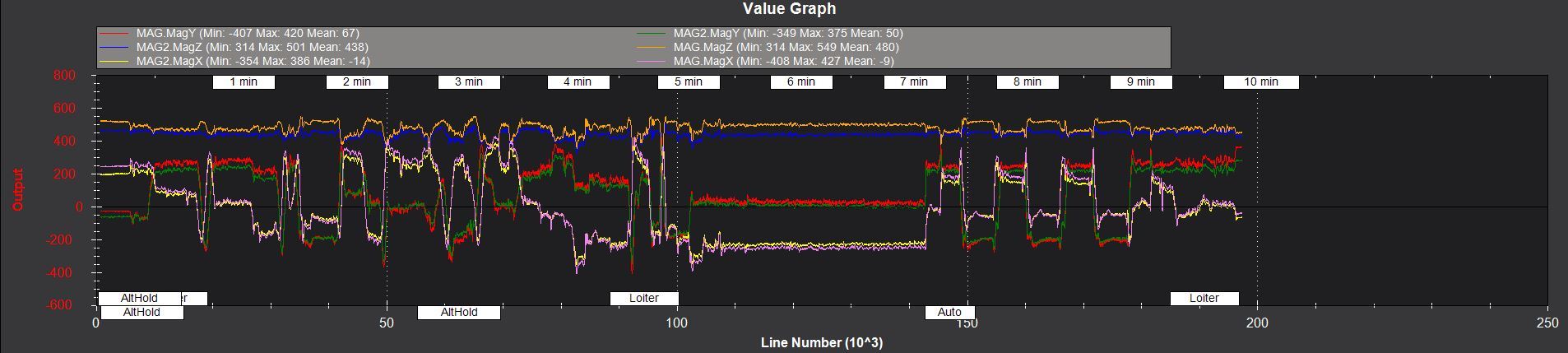
mag_field interference within limits (22.59%)
_Max mag field length (594.46) > recommended (550.00)"
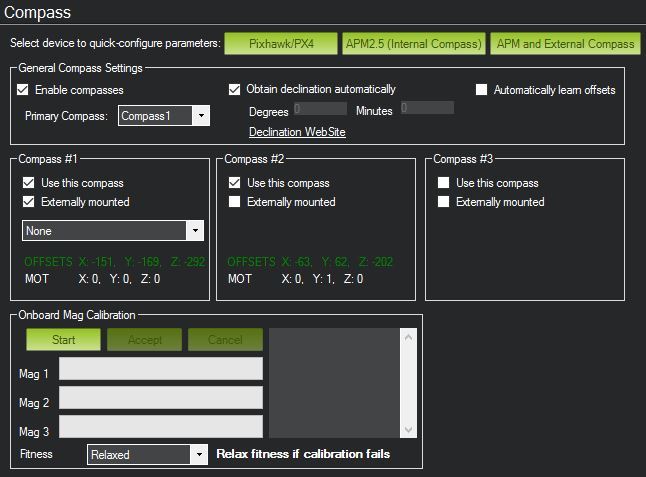
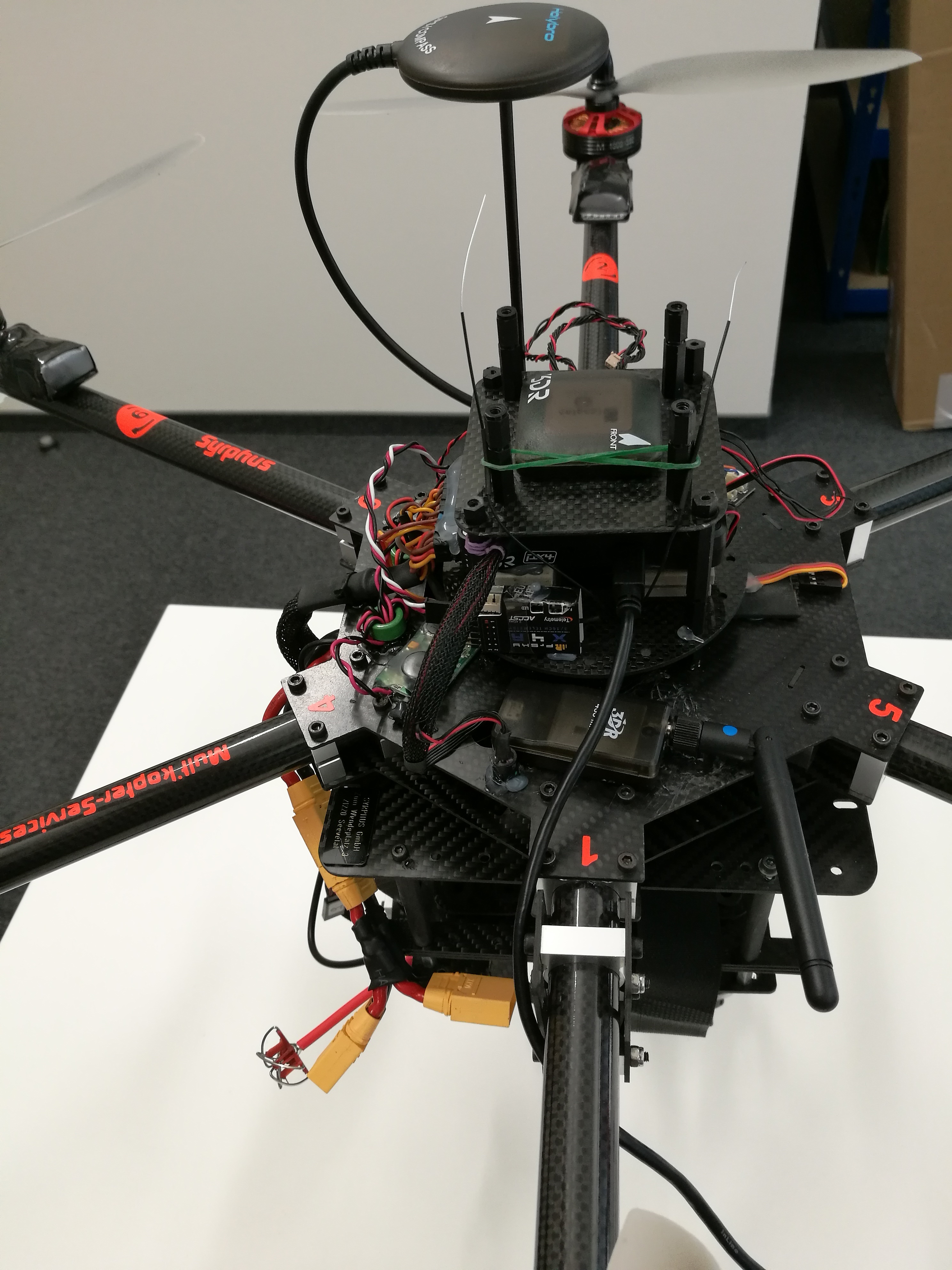
Compass1 is Holybro M8N on a 15cm pole; compass2 is internal Pixhawk1 (3DR). The additional 3DR modul is only used for GPS and compass is unplugged since it never did calibration successfully when using both sources on i2c.
When i view EKF status while flying the compass value is low and very few times rises (but stays below first barrier). There was no more compass related messages in MP like before but nevertheless i feel not very comfortable with the high values.
What are your experiences about the values and the impact on safety.
Thanks a lot
Alex