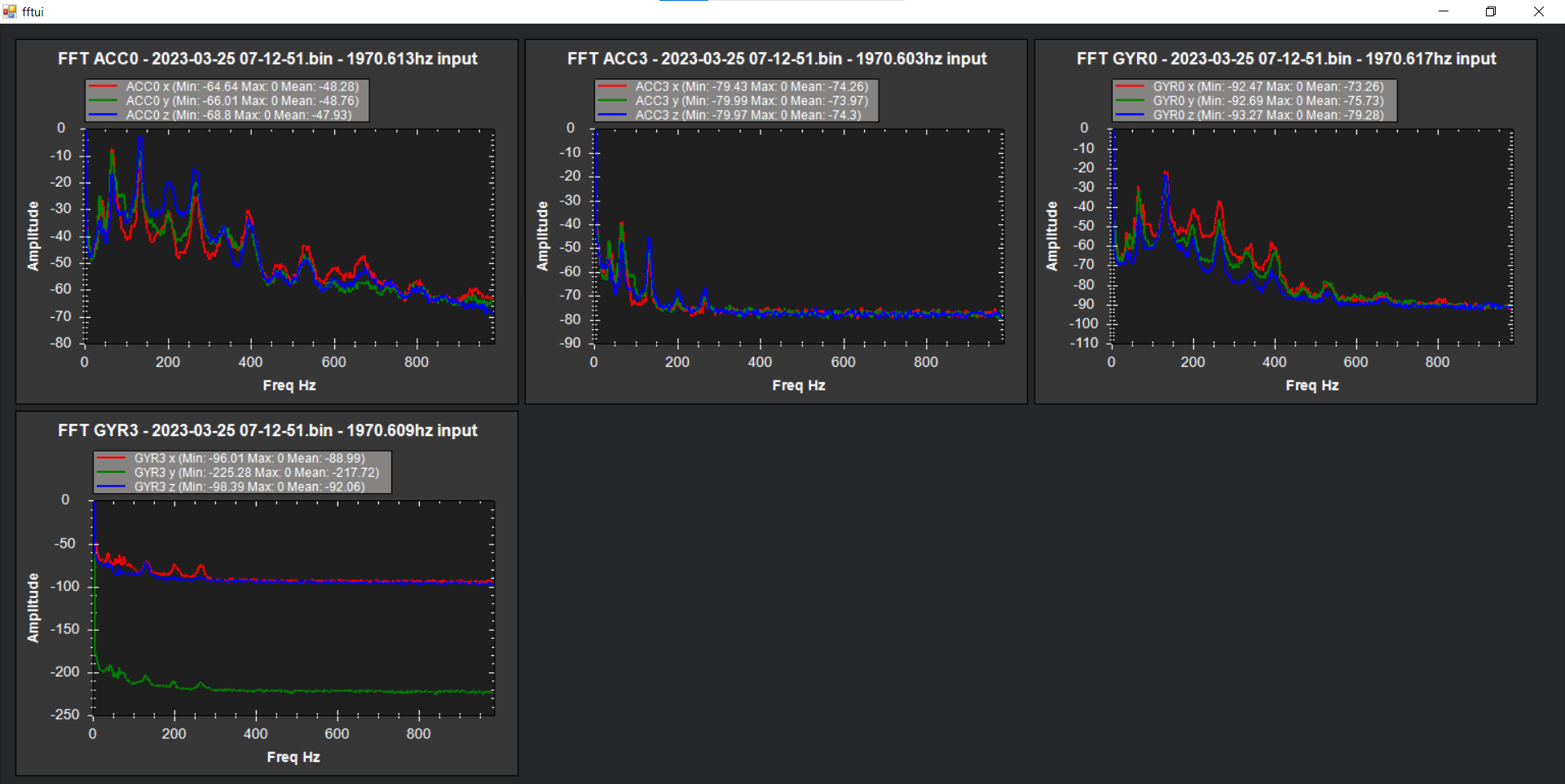
Thanks! Yeah, you are right. The peak is 70, I have adjusted the notch filter and I am waiting for a calm day. It is very windy here. I am going through the manual tunning process, what is your thought on that? Can you give any tips for manual tunning as I would be doing it for the first time?
One more thing I want to ask you, What parameters should I plot for the communication range-related issues? I want to test the radio communication range of my drone, what parameters/plots I should look for in the flight log?
It’s typically what I do. Or an Auto Tune and then further manual tune. It can be a lengthy process. I would always use in-flight tuning on a Chan 6 Tx pot, it can speed things up stepping thru a range of parameter values in one flight. Before you start manual tuning make sure there is no oscillation in the outputs. If there is this usually means dropping the Rate PID’s and setting the PSC _ACCZ_P/I values properly.
The RSSI field in the log but I don’t see one in your log.
Thanks again Dave for the tips, I would keep this in mind while doing the tunning.
Is it because I have not set up the RSSI parameters? As I checked the wiki, I found out that we need to set up the RSSI_TYPE parameter for the system. I am using a Skydroid T10 setup, do you have any Idea of what parameters I should put? I am guessing for value 5.
I’m not familiar with that system. There are different ways RSSI or Link Quality are provided depending on the RC protocol. Best to ask someone familiar with that system.
Hey Dave!
I have done the auto-tuning of the drone and the results are promising. I tried the manual tuning first but it was my first time so I was a little confused, as per instructions: Increase the term by 50% until oscillation is observed and then reduce it by 10% until oscillation is gone, and then further reduce it by 25%. How to ensure that oscillations are over the limit? and are there any plots that I can check while reviewing the flight logs to ensure the oscillations? because sometimes I was a little confused about whether there was an oscillation or not so I want to cross-check it by logs.
This is looking pretty good to me. I would set this:
INS_ACCEL_FILTER,10
I was going to suggest a bit lower Rate D-term but I think it’s OK. You could try another Auto Tune after setting the Accel filter and see if there is any change or just call it good and fly it!
Nice work!!
Thanks, Dave!
But can you please tell me the reason why do you want to set INS_ACCEL_FILTER to 10? I will take note and It will really help in future tunning.
“As per the wiki, the accelerometer path forms an outer loop around the gyro-based rate PID controllers. After the initial setup, it suggested me 20 as per my rotor size, and changing this filter does not affect much the vehicle’s ability.” This is what I know.
And one more thing I want to ask you, Is there anything I should look up to to make my drone more stable and smooth? As per the wiki, the only pending thing is setting the Input shaping parameters.
It is very safe and preferable to set INS_ACCEL_FILTER,10 for all copters unless you find it causes a specific issue (I doubt it). The default value is 20 and it should probably be updated to 10 as the new default.
10 Hz is still above the actual accelerometer data that the flight controller needs to operate properly. The higher value of 20 (or more) is just unnecessarily letting in more accel noise than we need.
It’s the Gyro filter value that is more important to set according to the prop size.
Hey Shawn! It is nice to hear from you. thanks for the detailed explanation. I have noted it down for my future tuning reference.
And can you help me with this also? Is there anything else I should do except input shaping setting? The point is I want to explore the capabilities of Ardupilot firmware in making the drone super smooth, tuned, and stable.
Hey Dave!
I hope you are doing well. As per your suggestion, I will set the INS_ACCEL_FILTER to 10 and again do the auto-tuning. Just waiting for the calm day to perform auto-tune. As @xfacta suggested, this value should be the same for all the drones so I will set this in my bigger drone also and perform the autotune.
Thank you so much for helping me out and guiding me in doing the full first-flight setup.
I have one query left, as some parameters would be dependent on hover thrust value (like Notch filter and acceleration controller gain) so if I put the payload in the system and then the hover thrust value will change again so am I supposed to change the dependent parameters too as per the new hover thrust value?
And if possible then, please reply to my old query also about
“Is there anything I should look up to to make my drone more stable and smooth? As per the wiki, the only pending thing is setting the Input shaping parameters”
I know I have been asking a lot. I can only say sorry for that as I don’t know where else to ask these queries.
Maybe, it depends on how much additional load and the conditions where the load is present or not. If it will be on the craft all the time then sure re-factor some of the parameters to accommodate it. If it’s an occasional load you could save parameters files containing only those parameters that would change between the 2 conditions. When you load such a file only the parameters in the file are changed, all else remains the same. If it’s a Package Place or sprayer type of load then you will have to perform further testing to arrive at a happy medium.
This is subjective and why I didn’t answer before. The tune looks good.
Hey Dave! Thank you so much for the reply. I have again made a note for the after-payload setup. I will be fixing the camera to my drone which will be a permanent present load so as per your suggestion I will re-factor some of the paras which are dependent on hover thrust and do the test flight to see desired and achieved results.
Drone is drifting in the AltHold mode without any wind and pilot input, I was guessing it might be because of the poor level calibration but when I checked the logs to see the AHRS Roll and Pitch during zero pilot input, I did not see much deviation. Is this the correct way to check the poor level calibration issue?
The result of after notch setup seems a little strange,
Hey Dave! I hope you are doing great.
I was flying my small quad today morning and everything was good but suddenly it got crashed. I am trying to find the problem but could not exactly able to find it.
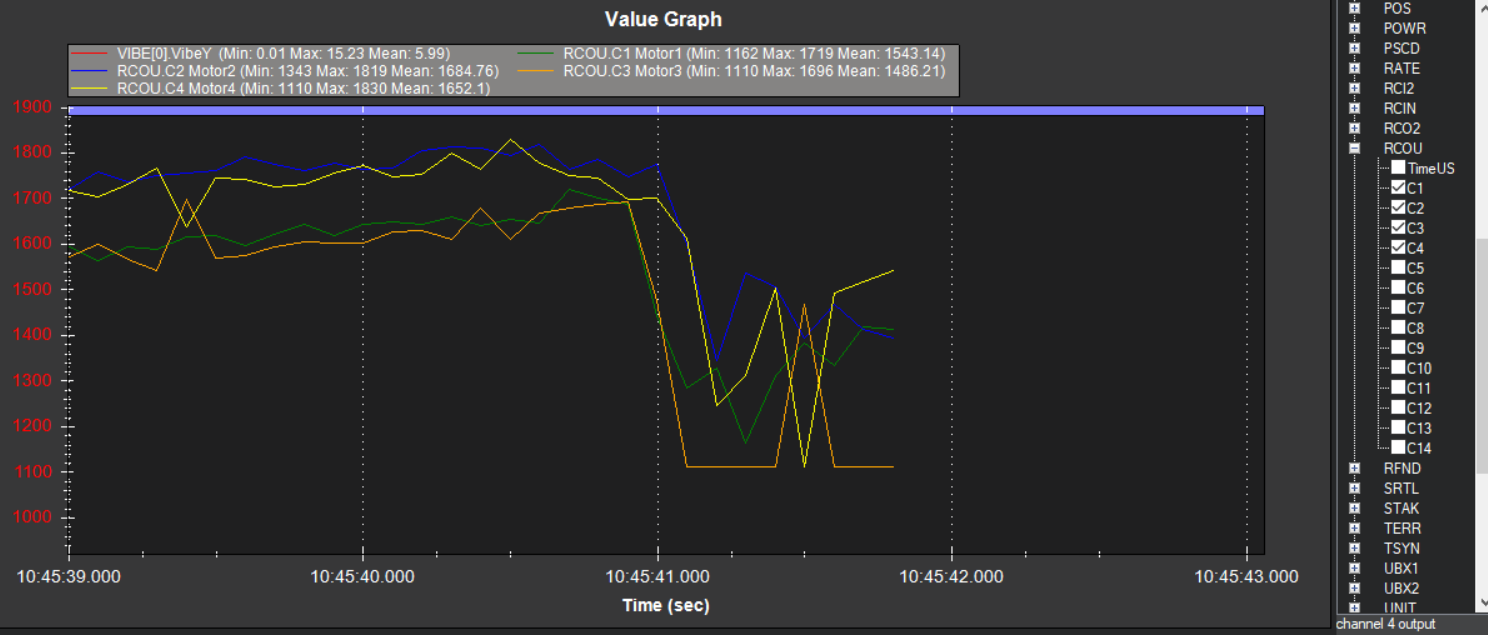
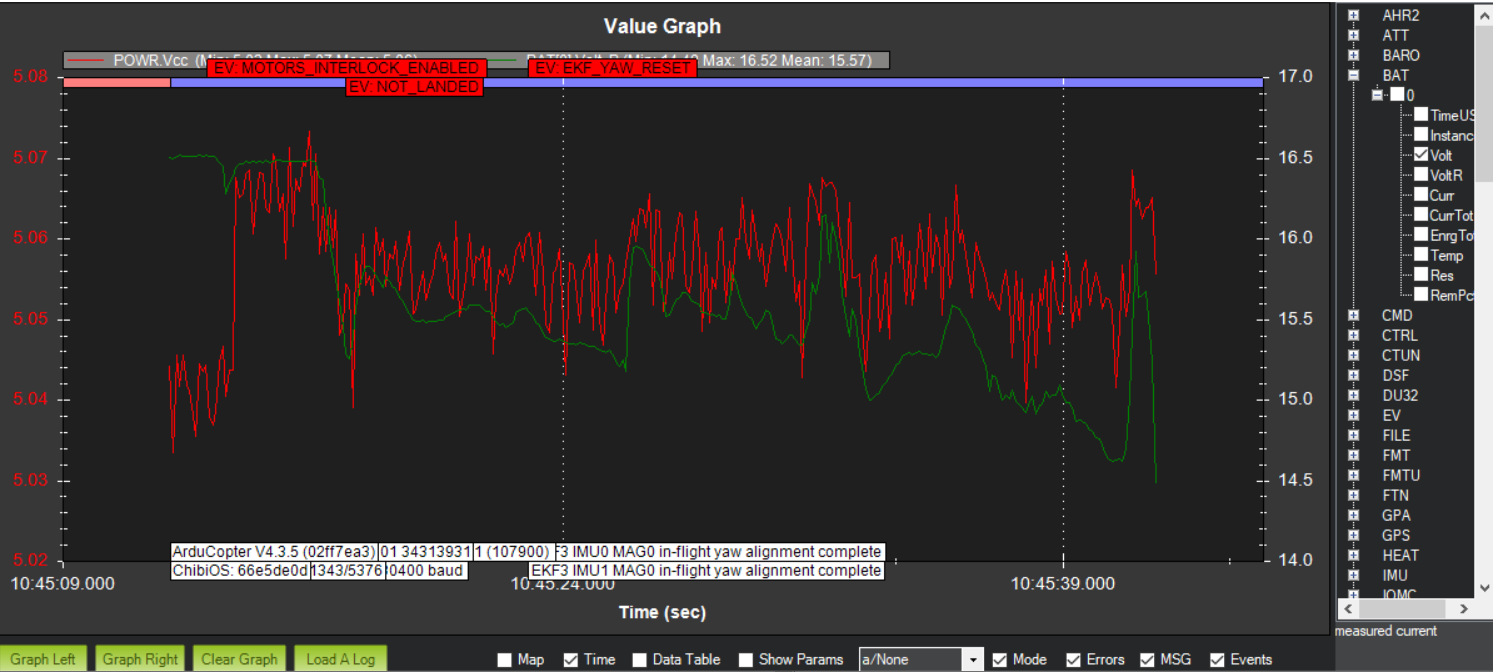
Can you please look at it and tell me what exactly happened, everything was good. It feels like the sudden motors stop running but when I checked the voltage, it is a normal drop.
Just before the log ends showing an altitude of 12m the Scaled Output Throttle (Ctun>Tho) was dropped but I don’t see why. The motor outputs dropped accordingly but I don’t know why the log ended abruptly. A power issue maybe.
Unrelated I suppose but do you have a Rangefinder that is not functioning?
Thanks again Dave for the reply.
Yeah! I am also guessing to some power issue. Maybe the battery did not connect properly so during the flight drone lost the power for a fraction of a second and ended up in an accident, It was on when I picked it up from the ground.
Actually, I tried to install the HC-SR04 Sonar rangefinder but I could not able to do it and then I have seen some posts about the sensor in the forum talking about how it is not good and all so I left the plan.
And if possible can you please answer my previous post queries? Actually, I am making notes of the full process with explanations and proper understanding so that it will be very helpful for me in the future.
And one more thing, I would really love to know your approach to the logs analysis. It will really help me a lot.
Thanks, Dave! Can you suggest some good rangefinders which are a little cheap and reliable?
I have checked the wiki page on the compatible rangefinders with the ardupilot, I want to know your recommendation.
I want to integrate them with the drone, one for altitude detection for precise landing and one for front object detection. Actually, I want to use them in a way that once the front rangefinder sense some object (within 2m) then it should stop moving forward even if the pilot is giving stick input. I know I can integrate them directly with pixhawk but I want to know whether is it possible to perform the above-mentioned case without the need for a companion computer?
Always looking forward to your response.
Thanks for all the help and guidance. My drone is flying really nicely and well and all credit goes to you.
I don’t use Rangefinders but some years ago I tried some of the ultrasonic units and found them to be mostly useless. You get what you pay for. I suppose I would start with a Benewake TF-02 Pro if I was going to add one to a multirotor.
Thanks for the info Dave! I would definitely try that. But can I integrate it in a way that once it senses the object, the drone should not move and hover its position even if the pilot is giving input to avoid a collision?