Hello everyone,
I assembled the quad and followed all the config instructions along with tuning. I also did compass calibration initially and later using script to fly quad in 8 shape, further did compassmot calibration by using ardupilot web tool. Even after above steps i see compass normalized innovation going above 1. I have attached the log for the following. Can someone please tell what might be the issue.
Even after calibrating compass the interference still persists.
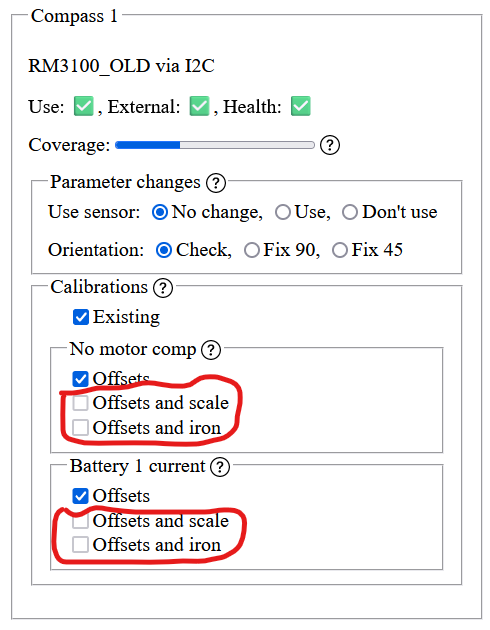
Also when i used ardupilot web tool the “offset and scale” and “offset and iron” option under motor and battery compensation is not available for check. Screenshot attached below.
They will only be available if a valid fit is found. That they didn’t work show the tool is having a hard time.
Your getting very large motor values. 16 mGauss/A. Your flying at 10 amps or so, so the correction is 160 mGauss. At your location the earth field strength is 420 mGauss, so the interference is about 40% of the signal.
If your can move the comaps further from the high current draw items it is always a better result than trying to deal with it in the calibration.
Thank you @iampete for your comments. There is no option to increase the height of compass from where it is now. I have figured out that I am getting most interference due to Li-ion batteries I am using. Do you know any solution that can reduce this interference please.