My 1st flight had the log as below:
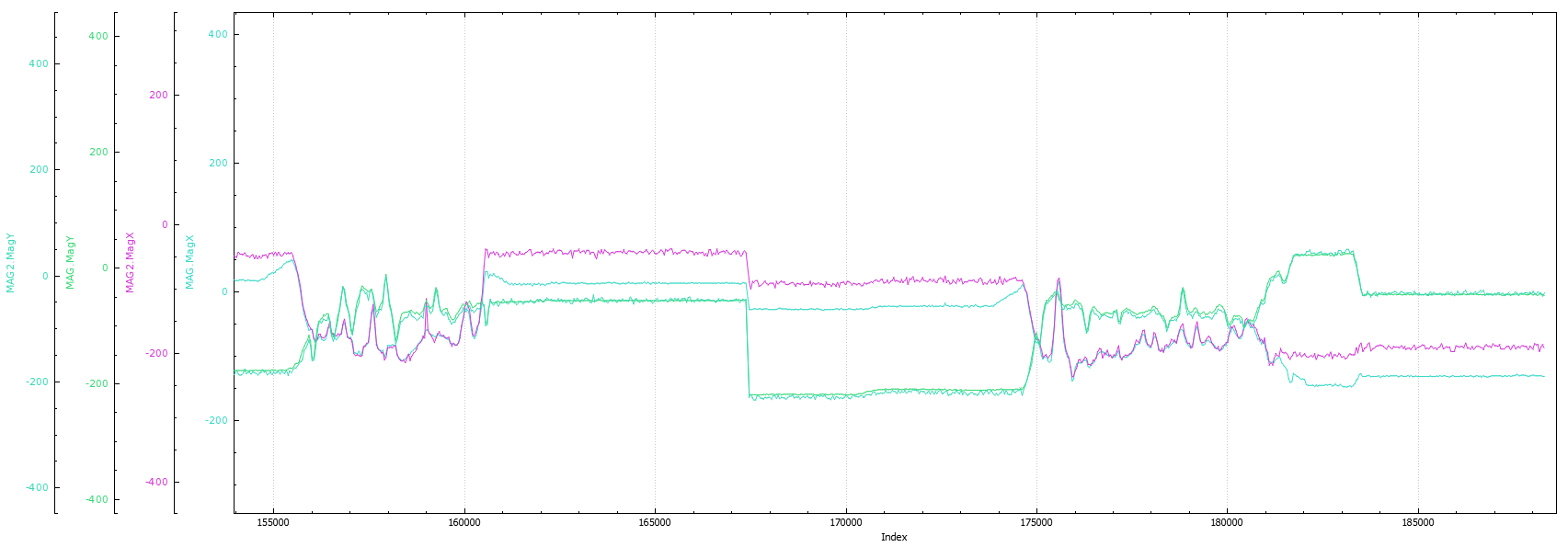
Then the second flight I had big Compass Magnitude,
Can anyone guide me, please?
My 1st flight had the log as below:
Then the second flight I had big Compass Magnitude,
Can anyone guide me, please?
your mag2 (internal) is a little bit noisy you can disable it with mission planner also re-calibrate your mag with QGC and your mag status must be in green aria for a good flight
and other notes for more stability and safety
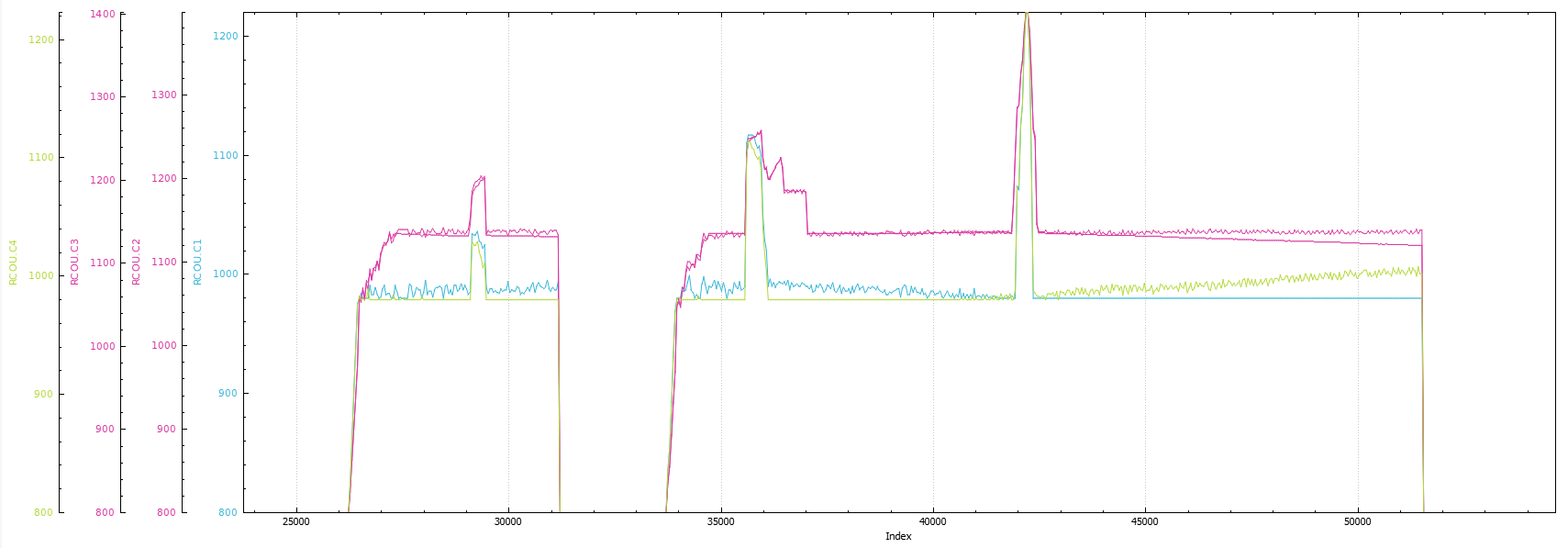
your copter is not physically balanced its heavier on left side (motor 3 and 2 working harder)
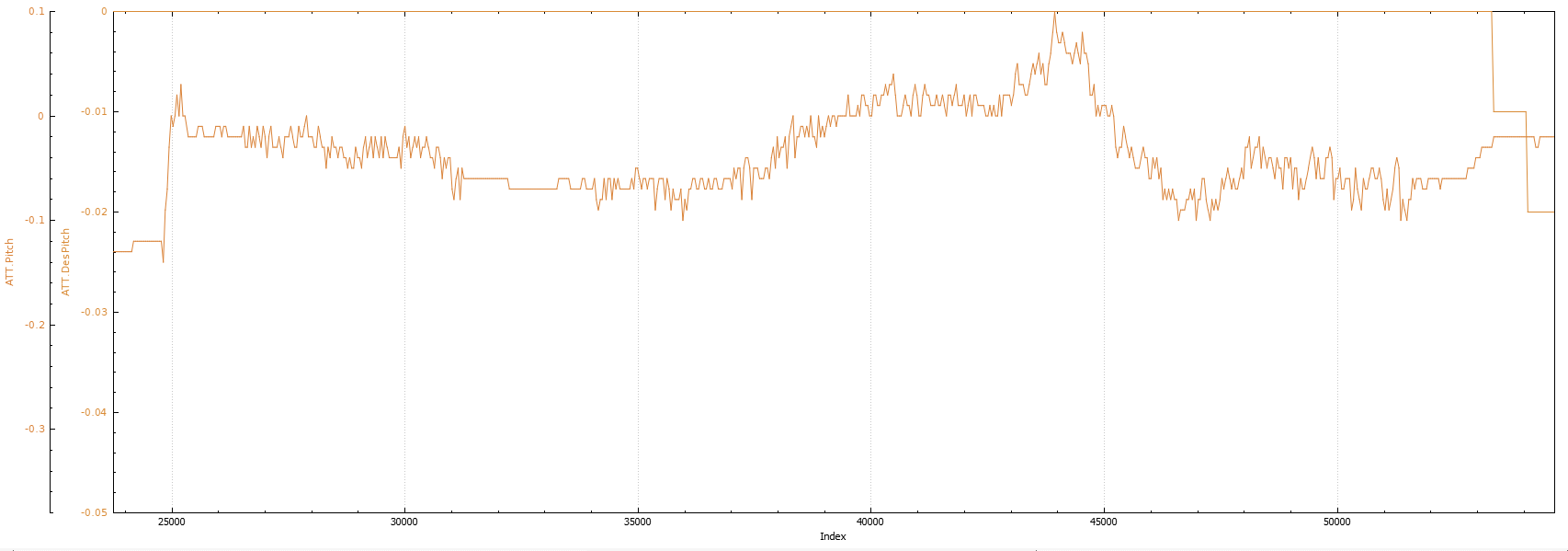
also you need to tune your copter its not stable enough for a good flight
Seems that basically I did not have to fly even. The thing is, am using F450 frame with Yellow 30A ESCs. Could the hardware be the reason?
I wouldn’t call those “flights”. Bouncing off the ground a meter or 2 doesn’t tell us very much. Get it off the ground several meters and Hover for a minute or so and then post that log.
Those ESC’s are very poor quality. Did it come with a kit of cheap parts? What do you have for motors?
Try a different location and pay attention if you are near to some noisy tower or power source.
if there is no interference source near to you then your best course of actions is to calibrate your compass and make sure there is no unnecessary long lead battery cables. keep noisy electronics away from your flight controller like ESC and power supply.
more details on the hardware used could also help.
The Compass/Motor calibration procedure is highly recommended if you haven’t already done it - be careful or it can be dangerous - read the instructions.
My aim is only to fly indoors which the ceiling wont let me fly more than 2 or 3 meters.Soo I guess we can call this a flight based on my purpose.
Seems that they were the cheap ones. My motors are DJI 2212 sth like 1000kv with 9450 props.
If you can guide me through this, I do appreciate it.
Am using the drone for indoor purposes only, and yes, there is a UWB attached on the drone but not near to it. Besides, my telemetry and radio are far away from ESCs.
Shall I put this as a last stage? The procedure didnt look peaceful tbh.
for first flight try to fly bare bone ,strip down all accessories and keep essential components only. once you have a solid flight you can add one by one.
Probably best to test and tune in a very large space, or outdoors, get it flying stable and reliably - then bring the aircraft inside and change any appropriate parameters.
Dave mean is that hover your copter at 1 or 2 meter for at the least 1 min for a better and more analyze able log
Your config is good (its like phantom 2)but the bad part is your ESCs they are basically for planes not copters
But as xfacta said first you need to fly and tune it in a safe outdoor aria then fly it indoor
Any ESC recommendation for Copters?
Im using “Emax BlHeli 25A oneshot 125” with same build as yours and they are working great
You can buy them from ahwazhobby 
Thanks, I wish they had delivery outside Iran as well .
Or just about any BLHeli_32 ESC you might find.
Agree with Shawn, even if you plan on flying it indoors get it outside for tuning. You will not realize good results indoors, unless it’s a very large space, with just a barometer and GPS. Consider an Optical Flow Sensor.
Also, make sure you disable any Failsafe that will result in a Return to Launch. If triggered indoors with default parameters you can do some damage.
I have a set of 50A Blheli ESCs for my smaller drone, they might be useful I guess.
Ok so the plan changed completely. GPS and Optical Flow.
Thanks again, hoping to come back with glod results.
What is a different between BL-Heli_S vs BL-Heli_32
I only know BL-Heli_32 is paid version
Thank you ![]()
ESC telemetry is the biggest advantage and many BLHeli_S ESC’s won’t run Dshot.
Hmm i think I want to put in this stuff ![]()
So now question is D-shot vs Multishot which is batter and why ?
ESC telemetry ![]()
![]()
![]() . it’s helpful but it’s show how much current draw also voltage ? , rpm is normal.
. it’s helpful but it’s show how much current draw also voltage ? , rpm is normal.
Thank you ![]()