I’m using mro pixracer pro which is having some issues. Since CAN ports do not work on FC, I used Here3+'s I2C port. However, while performing the compass calibration, the calibration is not completed. The green bar repeats every time.
Parameters:
GPS_TYPE = 1 GPS_TYPE2 = 0
Do I need to set any other parameters?
I also tried my GPS on Cube Orange and encountered the same problem again. I’m sure there is no magnetic field problem. Calibration progresses abnormally while the compass is stationary during calibration.
I don’t think you can successfully use the Here3 via I2C. Unless something has changed, communication is via CAN only (yes, I know there is an internal switch…to my knowledge it’s a debug feature and not exposed in any meaningful way for user use). I’m happy to be corrected (@CraigElder often has more in depth knowledge of these products than I do).
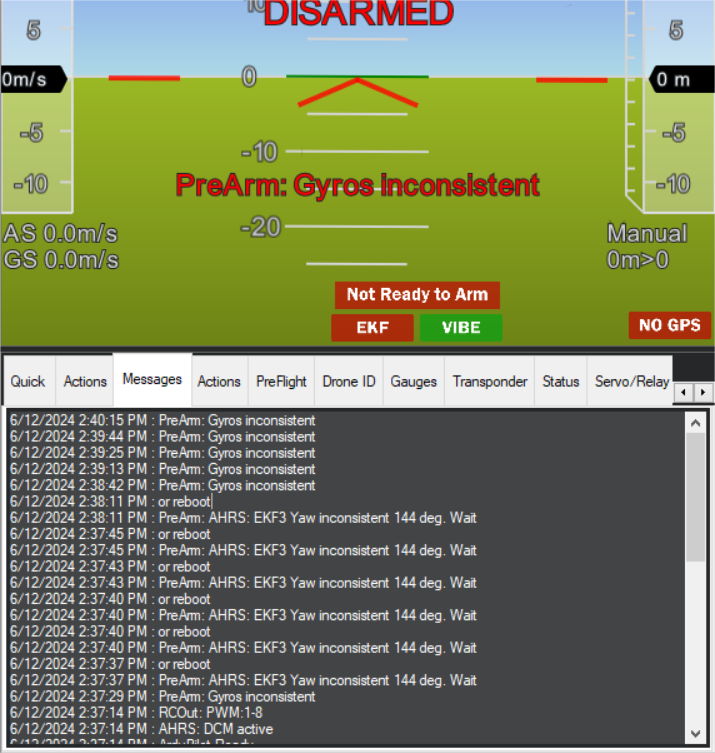
I set the parameters like this. This time the compass calibration is completed but I get the ‘Gyros inconsistent’ error. I rebooted and tried again and repeated this process a few times but the problem was not resolved.