Was trying to run a compass calibration this morning and ran into something odd.
I turned on all three compasses and started it going. Compass 2 and 3 completed just fine and compass 1 an RM3100, the green bar would run to the end then bleep bleep start over again and each time that occurs it runs even slower.
Now I admit I was indoors and the RM3100 is near the gimbal on the machine. But I have done this without issue before. I had upgraded the FC to the latest and greatest. I think thats 4.0.6.
Same here i was facing same issue when I update 4.0.6 , but when bleep bleep hear the sound then unplug battery and plug in and it’s look like fine , but in middle air you have a message only for you , "compass inconstant" +
EKF2 IMU0 ground mag anomaly, yaw re-aligned + Error compass variance
And once again compass calibration and this chain repeat again N again
Ok took it outside today…no go
Disconnected the gimbal incase it was getting issues from the gimbal…no go.
Disconnected the RM3100 and the other two compasses calibrate. The RM3100 will not.
Not sure whats up here.
I can try.
I don’t understand this. I am wondering if I damaged the RM3100 somehow or there is an issue with the distance it is from teh FC. I have used this RM3100 before with no issues. But it’s new location is farther out from the FC. So will try a different one later and your suggestion. Also will relocate it.
edit
So I pulled the RM3100 and replaced it thinking it was fungool.
I also unplugged the gimbal power.
The compass calibrated. So I put the first one back and bingo it calibrated.
I plugged the gimbal back in and it didn’t calibrate. I have moved the compass to a different location but so far with the gimbal plugged in the compass won’t calibrate.
I am at a loss to understand why.
no not wiring. The compass is seen by the FC.
The compass was moved to the far end of the quad away from high power lines. But what I didn’t expect was that the electronics and gimbal at that end would cause so much interference that the the compass would not calibrate.
So I moved it back to the original position but still no go. So I raised it up on a small mount with a grounded shield under it.
by wiring i meant (not so clearly though) location and inteference from wires and close components. There’s no work around, antennas in general need distance and gps need height (and some times ground plane).
Great work
ah yes I misunderstood where you where going. Yes wiring as it noisy stuff around it.
I don’t’ think it’s so much a ground plane as it is an RF shield. Just reducing some of the noise in the area, that’s my guess anyway.
I honestly don’t’ know how to pull Compass performance data to determine how its working.
I supposed I could turn on logging while disarmed and someone in the community would know how to check. But I don’t.
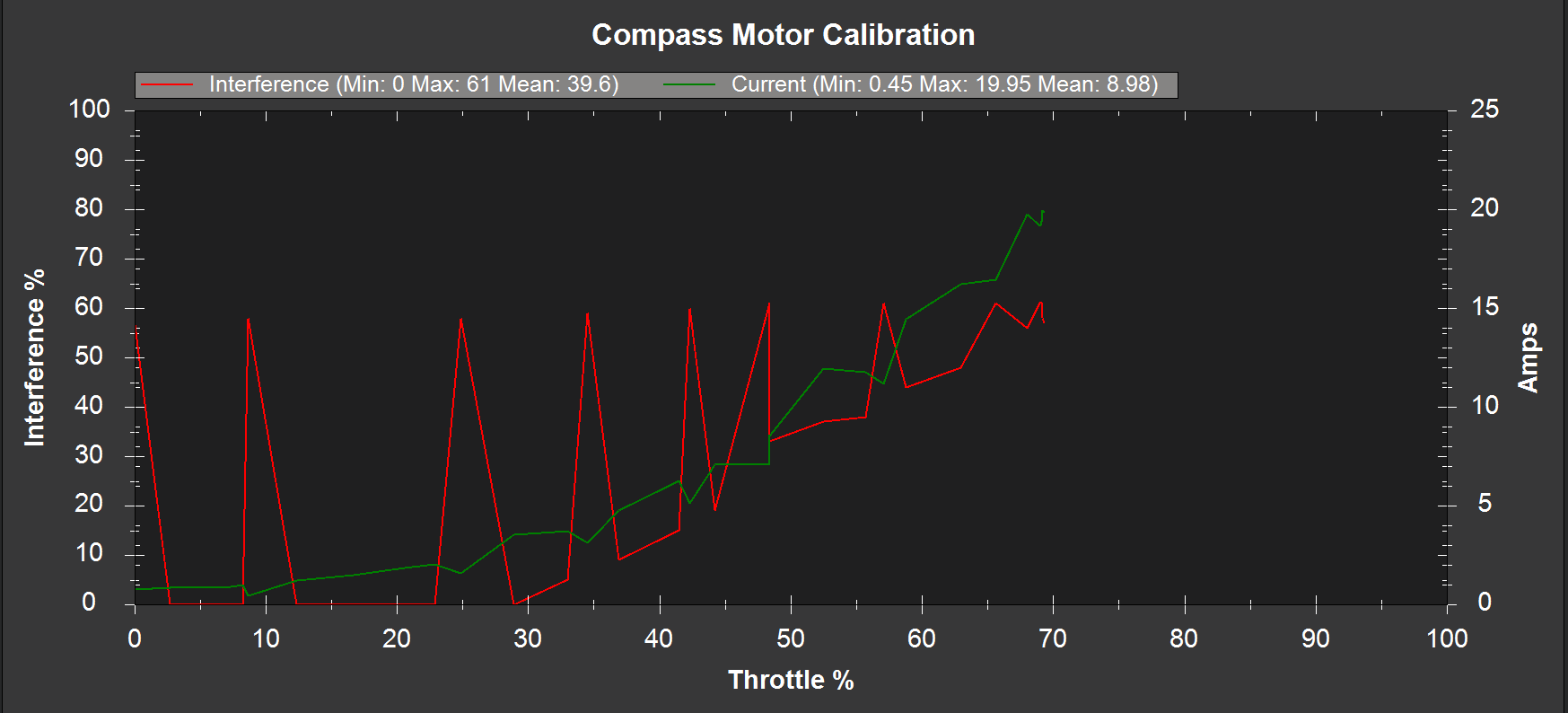
Ran the CompassMot.
I got about 36% interference. So that’s above the recommended.
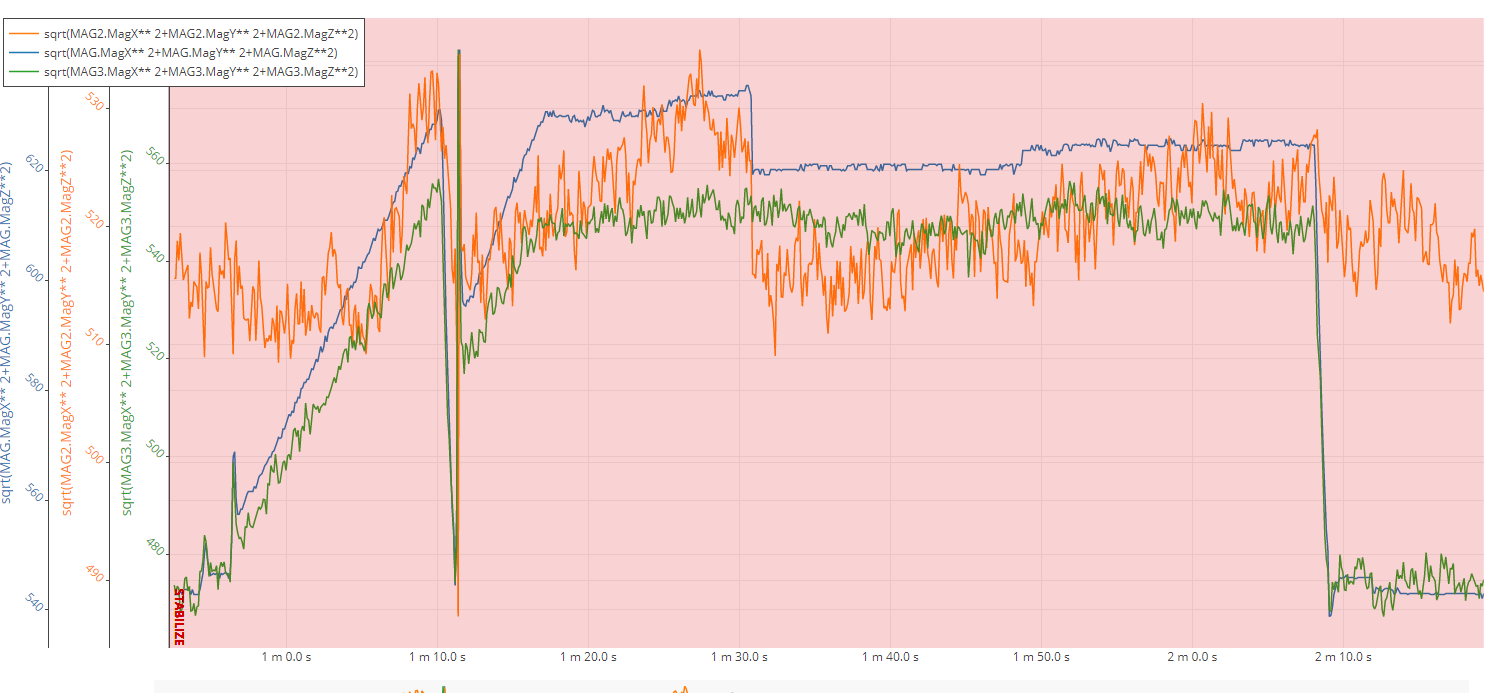
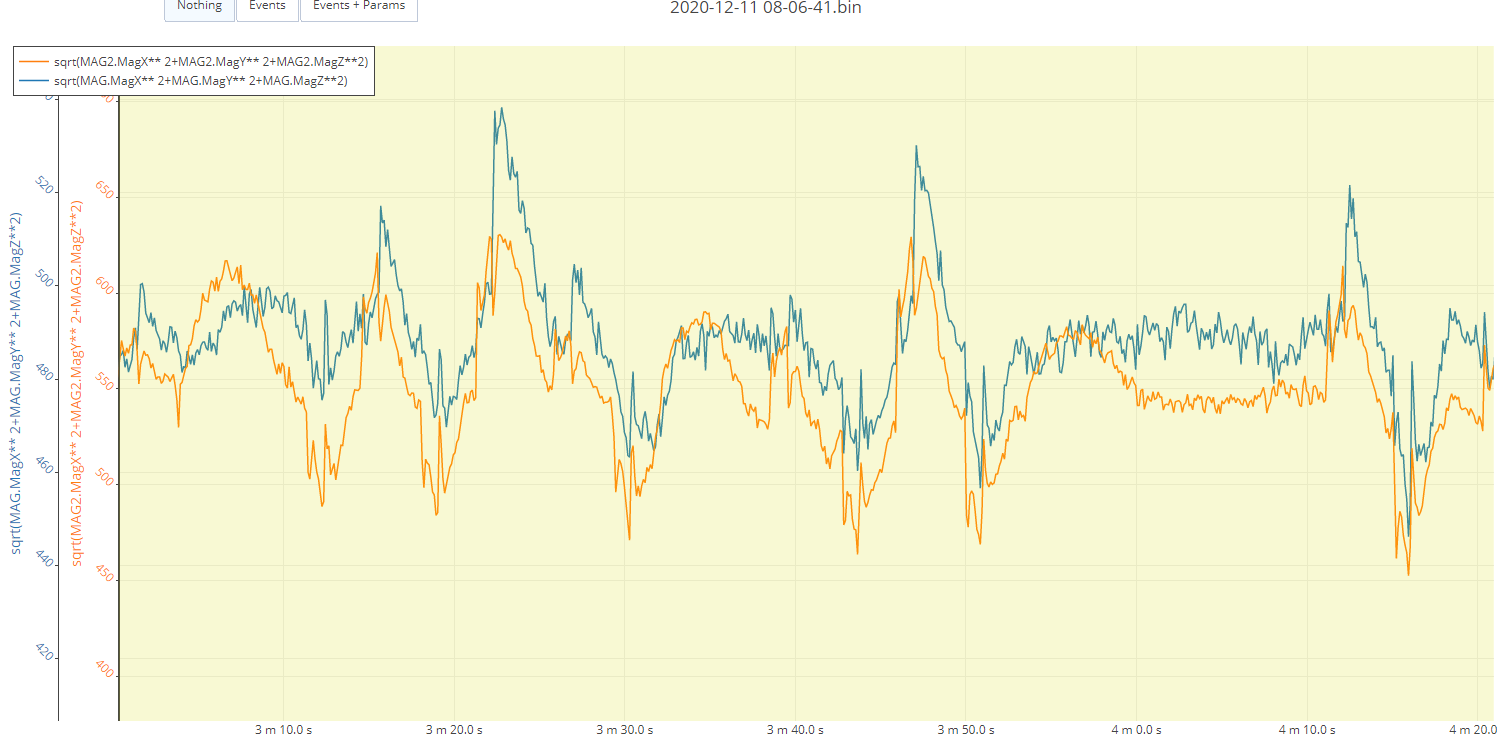
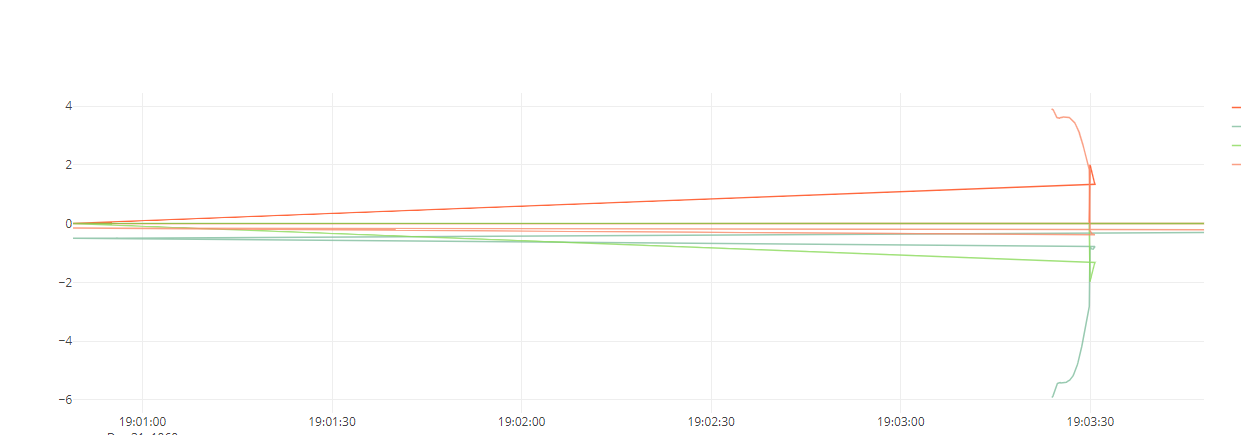
I then did a side by side comparison of the three compasses based on a function I was shown before.
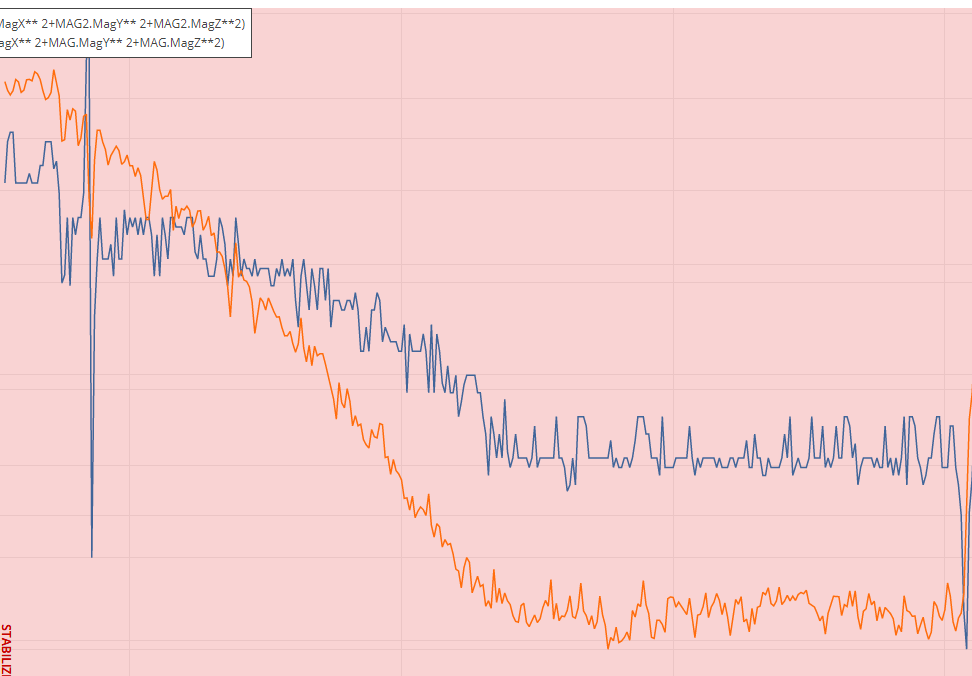
I can see the RM3100 (Blue) isn’t dealing with a lot of noise…this is goodness.
I can see that Compass2 (Orange) on the UAVCAN GPS is very noisy compared to the RM3100.
Interestingly the third compass (Green) which is on the Pixracer is performing better then the UAVCAN compass.
Tomorrow I am going to enable the fourth compass and check it’s performance. If it doing better then the UAVCAN compass I will determine which of those Pxracer compasses is the better and use it and the RM3100. Then redo the compassmot and see if the performance is better.
What are you using for shielding? Are you just shielding the compass/gps module or are you shielding the wire harness to it as well? (asking because I may try it)
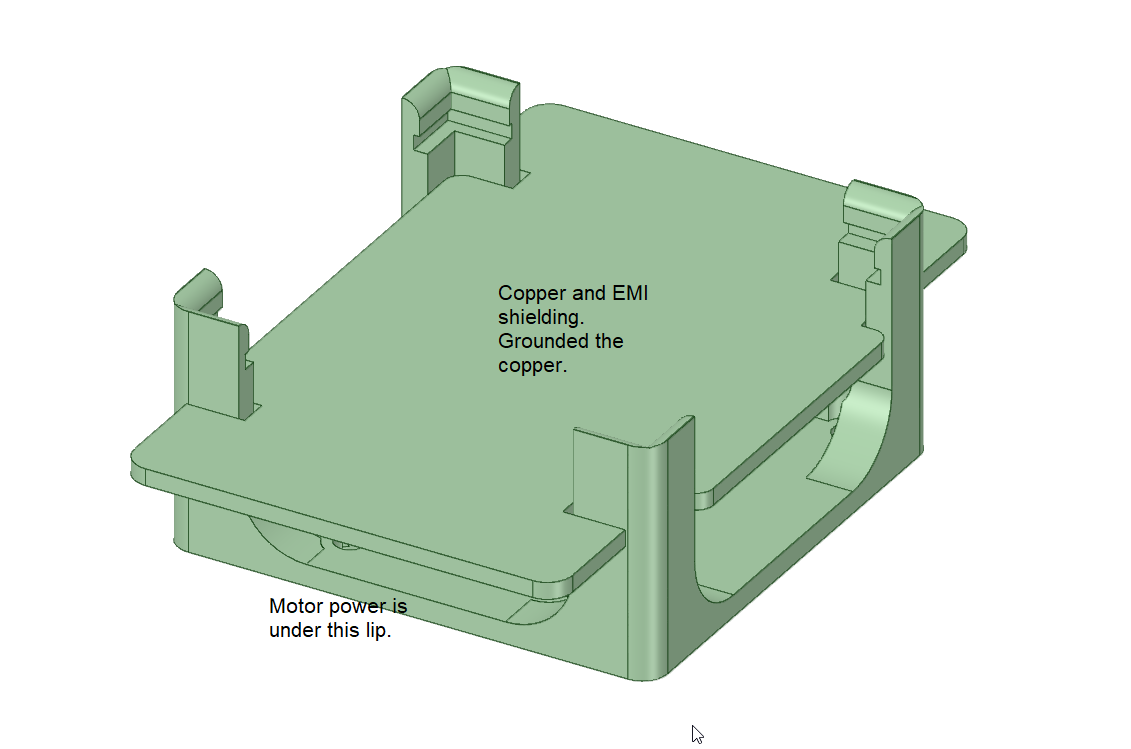
I am using EMI shielding from MRO Robotics and Copper foil.
I soldered a wire to the copper foil and ran it to ground.
For the GPS I had a 3d printed mount that I designed with an option to add a plate underneath.
That plate I covered with the copper foil and EMI shielding and again ran it to ground. Also the plate is wide enough that it covers the power cables that come in from the arms. https://store.mrobotics.io/product-p/3m-emishield01-mr.htm
@andyp1per Andy have you seen anything like this. Its weird.
If you look close the interference starts to spike when the current starts to drop and peaks when the current reach’s the bottom of it’s drop and then the interference starts to fall when teh current starts to rise again. That should be opposite…less interference with less current.
I should note that this is done indoors on the bench with the machine tied down.
This is the latest Mission Planner and the quad is running 4.0.6.
IF these peaks didn’t exist my interference levels would be in pretty good shape.
I am confused.
Also I can’t look at the log since the machine is indoors it appears that the time keeping is screwed and the graphs of current make no sense.
Well that was very different.
I did it twice to see if I could duplicate the results and in both cases the interference was around 20%.
So thanks @andyp1per
Sorry @rickyg32 , I don’t use compass motor compensation. I did on one quad and it seemed to cause some Yaw instability rather than correct it. And I guess I haven’t had a need for it since.
 ,
,