I’ve been trying to get this one flying (well) for quite some time now.
Tarot 650 Sport, 14’’ props, 6.6Ah LiHV (haven’t gotten the battery brick to work yet), Copter V3.5.0-rc5
Two problems:
Whenever I switch to Loiter, it takes off forward. I re-calibrated the compass, still same results. Only using the external one now, because someone told me my ESCs might be messing with the internal ones. Also, Auto Analyser says there’s no Mag data, which I don’t understand.
The copter seems weaker than it should be. According to ecalc, it has a healthy Thrust/weight ratio, so I guess it’s a Center of Mass issue (motor balance seems off). I assume that’s the issue?
The Auto Analyser would be referring to the fact you are not logging any Mag data.
Have a look at your logging levels and turn it on.
Doing your compass/motor calibration might help.
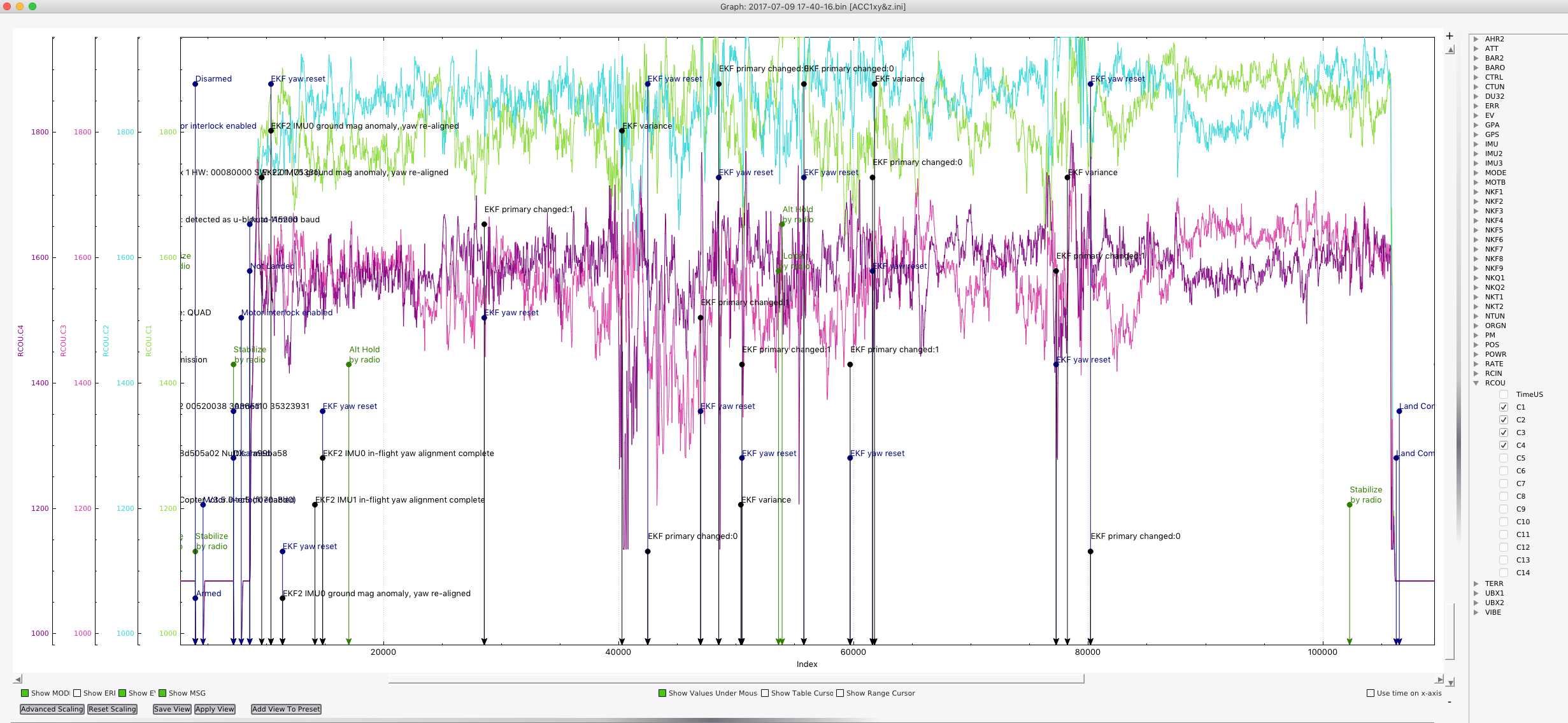
Motors 1 and 2, the CCW ones, are working flat out while 3 and 4 are not.
There is something not right there and I would start looking at Props, motor twist or frame twist, something mechanical.
This is assuming that ESC are calibrated right and other electrical issues accounted for, e.g., same motors, same age, bearings good, etc.
The need for stability in this case will be overriding flight direction commands, so I would look at fixing this first and see how it flies then.
It would be time to update to 3.5.0 stable release to replace the rc5 version you are running.