Does it really make that much of an improvement. If so I am for sure going to add that to my next build.
@tridge, These two articles are extremely well done and very valuable! Thanks.
I bought eval boards directly from Ublox for $250 each. I emailed from their website and was contacted by their US rep. At the time (2 or 3 months back), they were not available from stock in the US. Mine were shipped from Switzerland at a huge cost and sadly, I have yet to do anything with them! These boards are not small enough for a small airborne vehicle, but I need them for big rovers and perhaps a boat…
I assume the base station one uses with the F9P has to be capeable of providing L1 & L2, can you share with us wich RTCM messages you received from the caster (the information in the Mission Planner screenshot was clipped)?
I have noticed significant dB improvements with a good ground plane. It also eliminates multi-path reflections from the ground and the copter. I’ll see if I can put together some screenshots showing the power of the satellite signals with and without a ground plane under the antenna.
@rrr6399 when you say ground plane are you referring to the F9P GPS or GPS in general. If in general, I would love to see the ground plane solution. I have a new build I will start in a couple months so any little thing that helps. lol
cheers
I would think the ground plane would help non-RTK GPSes, but my testing has been done with RTK GPSes. Here is a nice study by u-blox on the effect of ground planes:
Achieving Centimeter Level Performance with Low Cost Antennas
https://www.u-blox.com/en/gated_files/nojs/webform/22168?gated_file_id=44720
Here is the punchline:
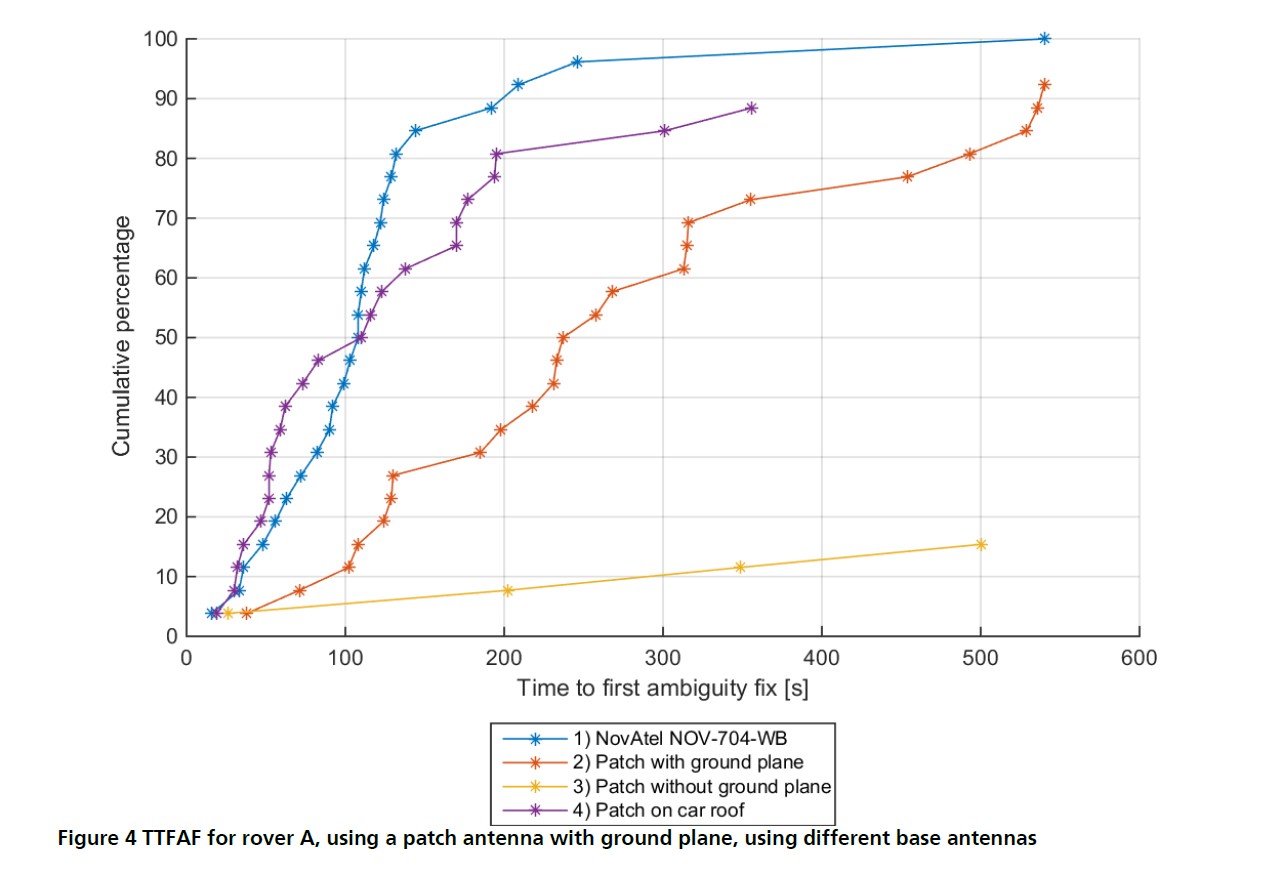
Very nice graph…lol…whats it mean. Whats the cumulative percentage indicate. Sorry for me I know it’s saying something important…but it’s Greek to me.





Just some Ideas for you.
A tin lid, beer can, copper clad board or aluminum sheet all work the same.
- ground the ground plain
2 check the elevation mask is high enough (13-15)
3 check SNR ration is high enough (35-40)
Thanks @mtnsurveyor curious what you mean by ground the ground plane. you mean tie it to battery ground. Or ground it to the GPS antenna in some way.
Wait technically thats the same thing…never mind
Exactly, No need to tap into the GPS wiring.
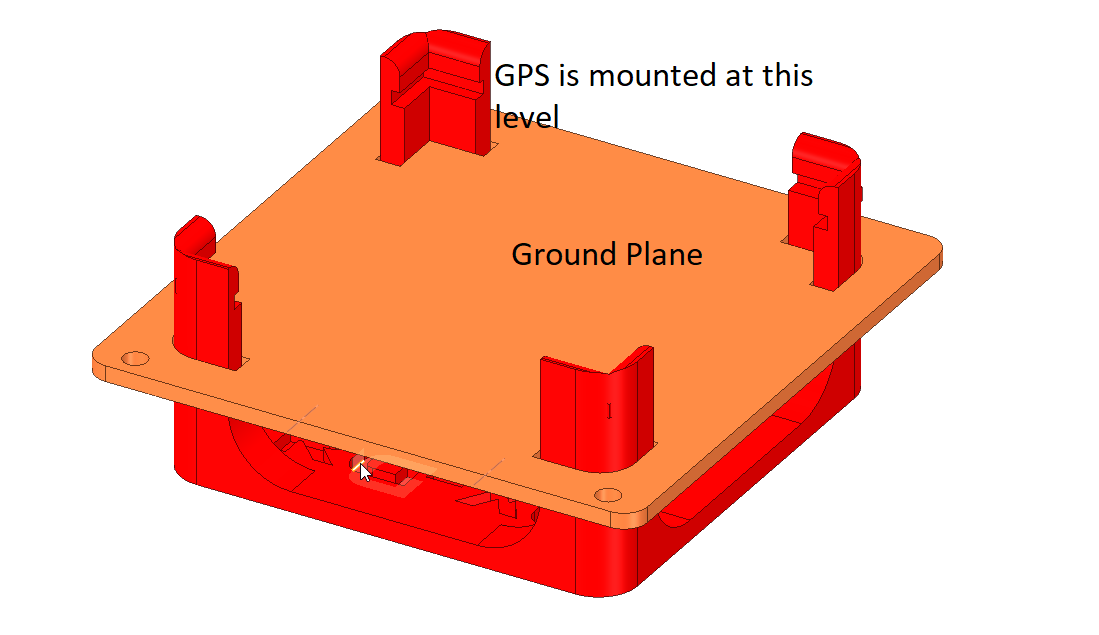
I am modding my GPS mount with a ground plane. Is there any guidance about distance between the GPS and the ground plane
As close as possible, you should match the bottom of the patch antenna but we can’t really do that.
1 Like
The choke rings function well and are easy to bring level with the stock internal ground plain.
match the bottom…as it the plane conforms to the shape of the bottom of the gps.
I have a plastic snap in mount for my GPS. I have no modded it based on your input to include a ground plane. I need to check to see if I can get it closer to the GPS.
This is for the Zubax GNSS v2 GPS
Looks good I would not worry about it.
1 Like
Yeah, its not clear from the graph. It is basically the percentage of 10 minute test periods in a 5 hour period that had an Integer RTK Fix for a given amount of dwell time. For instance, the NovAtel had 50% Integer Fixes within the first 110 seconds or so.
Here is the explanation from the paper:
“In April 2016, a total of 5 hours of data was recorded simultaneously using u-blox NEO-M8P receivers. The time-to-first-ambiguity-fix (TTFAF) metric was used to assess the impact of the antenna setups, because multipath is a critical factor that affects the ability of the receiver to converge and fix ambiguities. The 5 hours of data was divided into 10 minute periods. For each 10 minute period, the TTFAF was measured where the TTFAF is defined as the period of time between the first position fix and the first integer ambiguity fix from the M8P solution.In April 2016, a total of 5 hours of data was recorded simultaneously using u-blox NEO-M8P receivers. The time-to-first-ambiguity-fix (TTFAF) metric was used to assess the impact of the antenna setups, because multipath is a critical factor that affects the ability of the receiver to converge and fix ambiguities. The 5 hours of data was divided into 10 minute periods. For each 10 minute period, the TTFAF was measured where the TTFAF is defined as the period of time between the first position fix and the first integer ambiguity fix from the M8P solution.”
hahahahaha yup that helped.
hahah.
Thank you for trying it’s appreciated…but still greek to me. But thats ok. GNSS=good F9p=great.
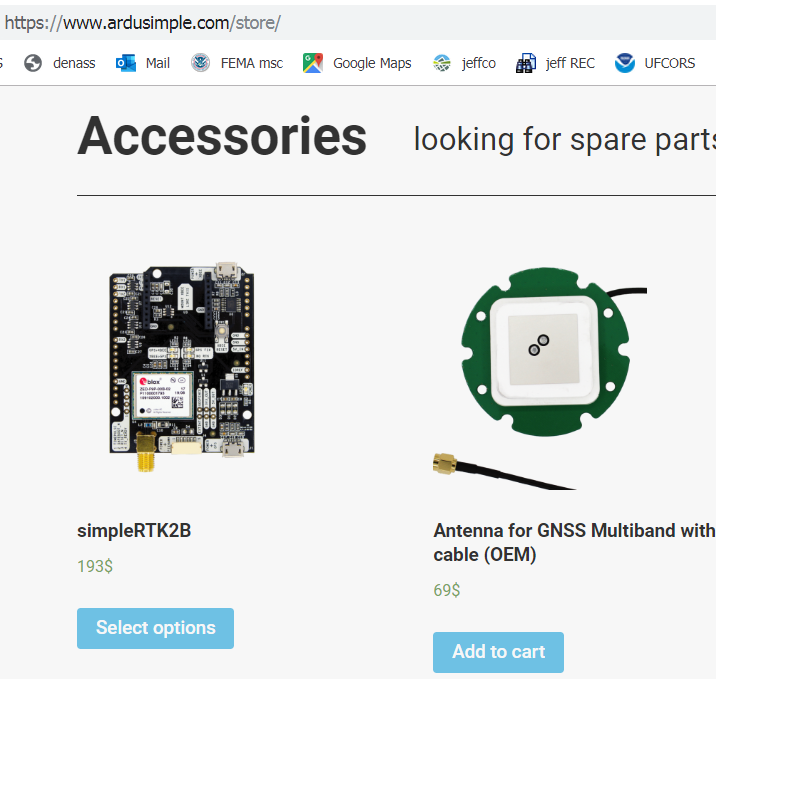
I found this antenna and wanted to share with you. Looks like a ideal start to build a ground plane antenna. I ordered one and will see.
Interesting but why does it require the two components. I assume the one on the right is the antenna.
The left the compass and receiver I guess. Wouldn’t this be easier to deal with
https://www.csgshop.com/product.php?id_product=266
1 Like