Hello everyone I have autotuned my quad following the steps as per blog post of Methodic Configurator. I did a an auto mission (a rectangle path) from fully charged battery to battery failsafe. The WPNAV parameters were default ones. Can someone please look at my logs especially whether the Notch filter settings, PID values and Rate.Out. Batch sampling was also ON for this flight.
There is also a pattern seen in Vibe Z. They are going around 15 m/s/s nearly at the same spot. What might be the reason? Log
One observation was when I put in ALT Hold mode, arm the copter and increase the throttle I see some oscillation at very start and then it goes away as throttle rises.
I know that is not what is written in the blog post, I wrote it myself, but some creative users interpret it that way, causing incomplete tunes. The software does contain some details that are not in the Blog post.
So I ask explicitly: did you used the software, like you were supposed to? Or did you just read the Blog post and used mission planner to manually change the parameters, bypassing the automation that the software offers?
I was reading the blog post and using Mission Planner. But I followed every step in it. I also looked at Andy pipers two videos based on that blog post.
Nope, that does not cut it. The software automates functionality that I did not described in the Blog post, if I had the Blog post would be even bigger.
Actually when I am worried that it is setting stabilise values higher in Yaw than in Pitch and Roll. Also when I slowly increase the throttle the copter wobbles till it takes off after that it is stable.
these will drop back the logging to something useful, and set the notch filter to values that will be modified upwards as required by the ESC RPM. Where you had the Freq and BW set to the primary peak, the ESC RPM wouldnt be able to lower that frequency and bandwidth when required, only ever higher.
I think you have a few extra options you probably dont need too. I would just have Multi-source selected. You could try without the other options and see if they make any actual difference to the FFT data after a flight. Add back in one option at a time and see if it really helps.
Thank you @xfacta . I will do these changes and post a log.
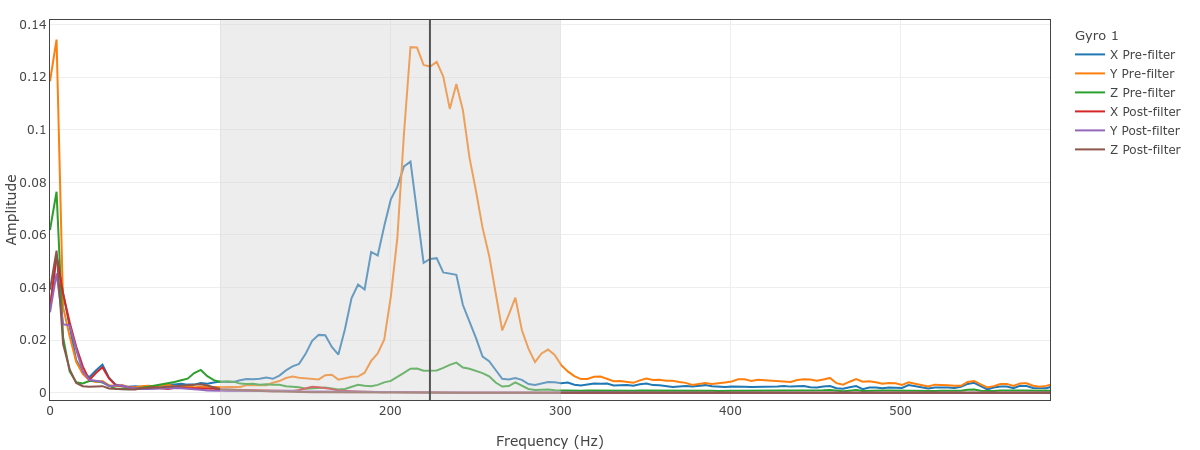
The highest peak in FFT is around 219 Hz, and the bandwidth is around 80-90 Hz. Is 25 Hz sufficient?
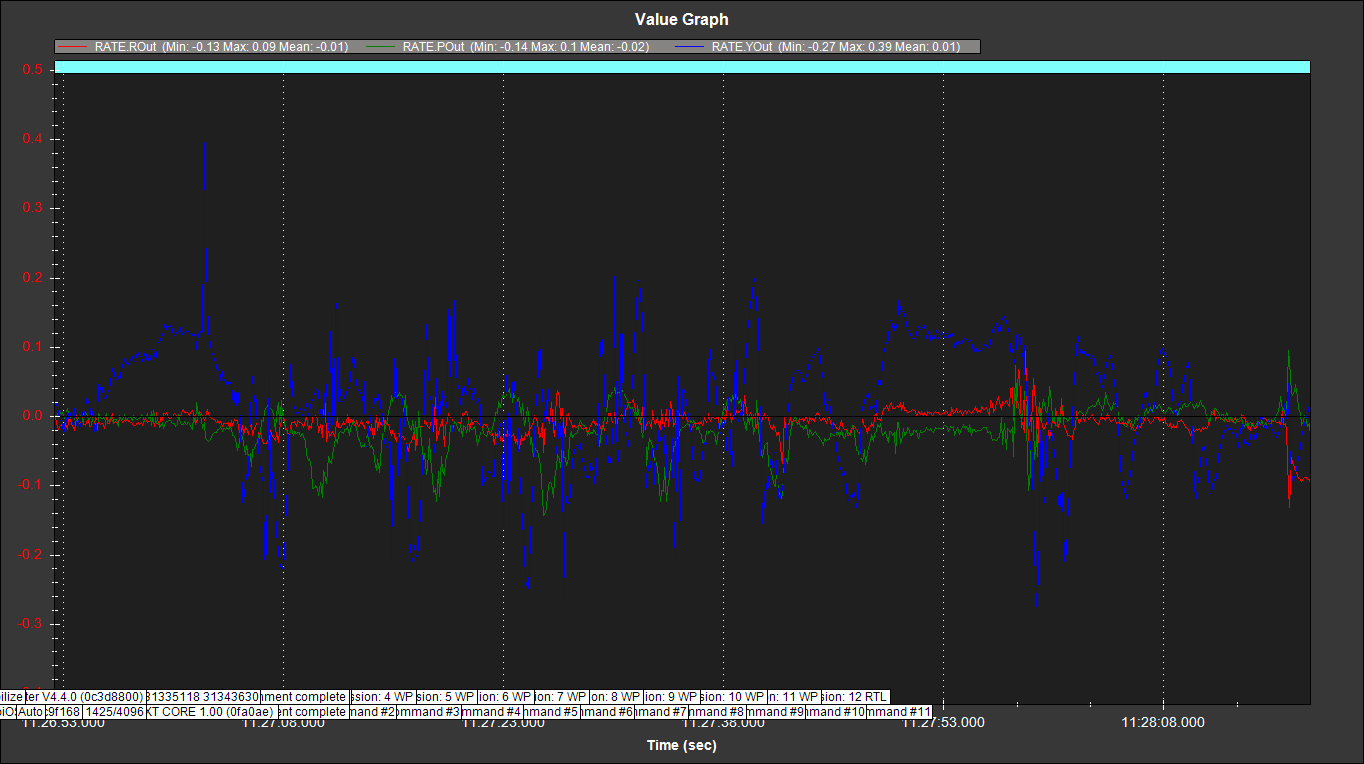
Should the Rate.Out parameter be always be less than 0.1 during any flight or some exceptions are allowed?
When using per-motor notch (multi-source) then we usually only use about a quarter of the frequency as the bandwidth, instead of the usual half. The smaller you can make the bandwidth and still filter the noise well enough, the more responsive and tunable your copter will be.
Dear @xfacta
I did the changes suggested by you. The phase angle is around 250 degrees which was more than 400 degrees earlier (checked in Filter review tool).
I retuned the copter in roll and pitch again after these changes and yaw params same as below
My Rate values are below 0.1 in roll and pitch but in yaw it is more than 0.1 for many times.
There is that tiny blip of noise just below 100Hz, it’s not worth targeting though. If you do want to reduce it some more, lower INS_GYRO_FILTER to 60 or 55 which shouldn’t affect anything else too much.
If you are worried about responsiveness, deselect the option for “run on all IMUs” but CPU load looks OK how it is now.
Attitude control looks good. I would leave Yaw unless you have an issue with it’s behaviour.
PIDs look believable. It probably comes down to how you like it (or not) or if you can find any issues. There’s nothing standing out in that log.
Thank you @xfacta for reviewing my logs.
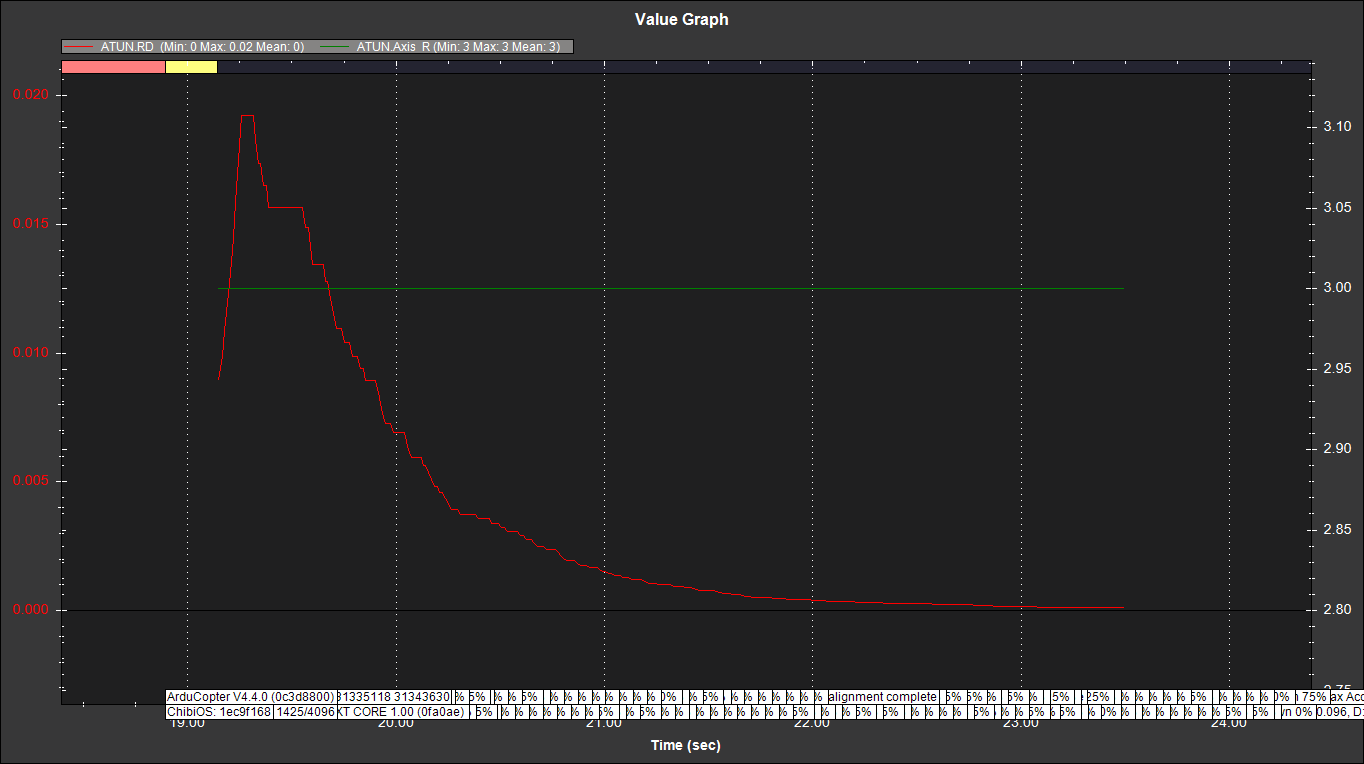
To understand the autotune of yaw better I autotuned YawD again. AUTOTUNE_MIN_D=0.0001 and the starting value (which was end value of last autotune) was 0.0089. The aggressiveness value was set to 0.05.
I observed that ATC_RAT_YAW_D value rose from 0.0089 to 0.019 and lastly it settled to 0.0001 (equal to minimum value).
Does it mean that there was more noise in the system so it was unable to tune properly?
@xfacta I referred to Andy Piper’s video, he says that yaw axis is generally very strong hence aggressiveness should be reduced. He used 0.05 for 7 inch Chimera quad
I tried 0.07 and 0.06, my P value was going above 1 and when I flew with this quad the frame used to oscillate at initial stage before take-off