I did autotune multiple times at various gyro rates increasingly and finally set at 150 Hz. I needed opinions on the tune that i have come up to call it a final tune.
The fft was also enabled in the log.
I have accelerated the drone to and fro in stretch of 150 metres and a simple hover test as well.
Attaching the log file below.
Logs
While tuning roll and pitch the aggressiveness was kept to 0.075 while tuning yaw it was 0.06.
The all up weight of copter is around a kg.
I think it would be better with the gyro filter at 100Hz (or even 80Hz to be sure), below where the real noise starts to happen. There is also too much going on with lots of unnecessary notches and harmonics.
Use these settings shown here.
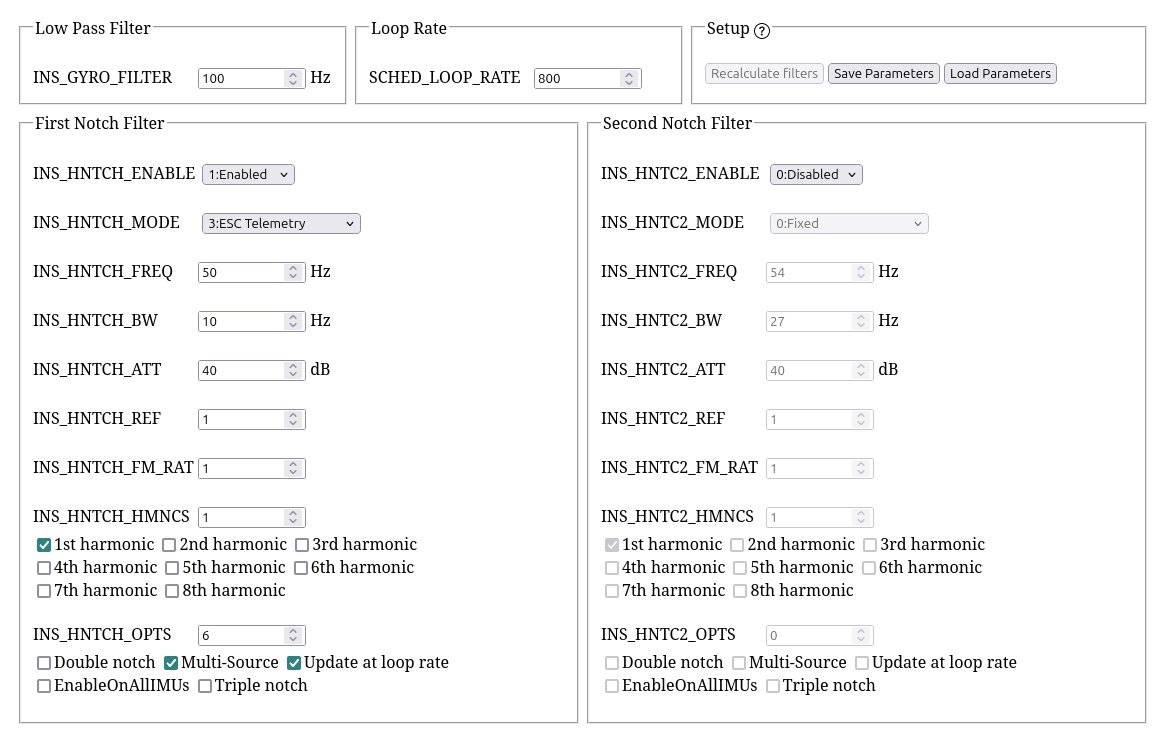
Those setting should give you:
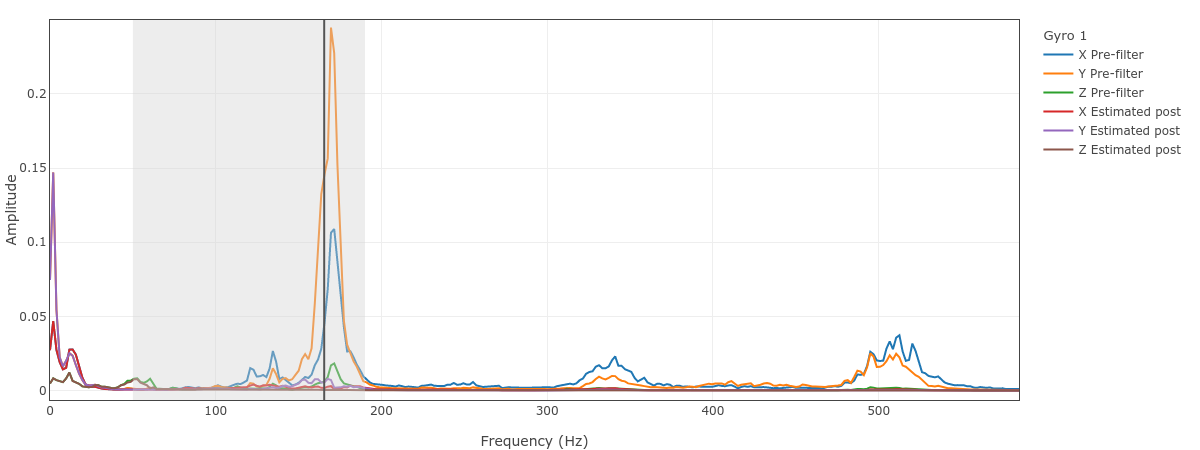
There is no need to filter the extra harmonics seen in this graph, as their pre-filter noise is not making into the post-filter.
Apart from that pitch and roll attitude control looks very good. Yaw is a bit fuzzy but probably OK considering the amount of pitch and roll going on.
I would set these:
ANGLE_MAX,4500
ARMING_CHECK,1
ATC_THR_MIX_MAN,0.5
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
What battery do you have? At the end of that long flight the voltage was really starting to get towards the danger zone where it will suffer permanently.
EDIT:
Is it 4 cell Li Ion? You have all the correct settings for it, maybe you are exceeding the C rating, or it’s getting a bit tired. Probably just keep an eye on that voltage, and set this for a conservative failsafe:
BATT_LOW_TIMER,5
1 Like
Thank you @xfacta for reviewing it.
Yes, i am using 4 cell li-ion battery. I will set the bat_ low_timer to 5.
After setting gyro to 100Hz or 80Hz, and changing notch settings should I autotune again or leave as it is?
Can you please tell whether there is frame resonance present? And is it significant?
I would say you may not need to Autotune again, only if you find some issue. The tune was already quite good and I would expect it to survive these changes.
There doesnt look to be much frame resonance - that usually shows up as an odd noise frequency not exactly aligned to the motor frequency, and it can be hard to filter out. Or vibrations that will just NOT go away no matter what you do.
1 Like
@xfacta I just realized that in harmonic notch the frequency to bandwidth should be 5 according to you. But I have read many times that it should be 2. Can you tell what difference does this make? And how do we figure out correct ratio?
I think you mean the ratio of frequency to bandwidth is normally 2 → that is the bandwidth is half of the frequency. This is true for a basic notch filter like throttle-based, where the is just one source.
From multi-source, which is one notch per motor (usually from ESC RPM data) then we usually say that ratio is 4 → the bandwidth is a quarter of the frequency.
Always it is best to have the frequency, bandwidth, attenuation, harmonics and other options set to just the minimum required to get the job done → less is more ![]()
2 Likes