After a few setbacks that included severe vibration and a motor failure I replaced the motor / esc and am back tuning my x8… having just finished all 3 axis I was hoping someone might give me advice on making it a bit less aggressive… I did receive alerts “copter failed to level tune manually”, but it would finish… attached is Tuning_log… Microsoft OneDrive - Access files anywhere. Create docs with free Office Online.
Note I first used .1 for the roll aggressiveness then backed it to .09 on pitch and yaw. the copter is used for photogrammetry and inspections and uses KDE props (12 1/2") @xfacta had previous showed me how to set up the notch and gave great advice on two of the copters Im currently using…
I appreciate all help… Thanks
The Autotune log is not much use, get out and do a flight around and show that log. Hovering is OK with some gentle movements, and some general flying with turns.
Set INS_HNTCH_REF,0.30
so the harmonic notch filtering starts working just below hover throttle.
Also keep these set
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2 or 0
so we can see if the HNOTCH is working properly all the time. Hover throttle and some of your other tuning params are likely to change during early phases of set up.
Start by changing the RC feel, ATC_INPUT_TC,0.2 (higher is softer)
and you can even put it on a tuning knob but it must be dedicated to channel 6 on your transmitter. Set these params and Ardupilot will know what to do
TUNE,45
TUNE_MAX,0.15
TUNE_MIN,0.3
Don’t change PIDs and other things that are very specific to your motors/props/ESCs.
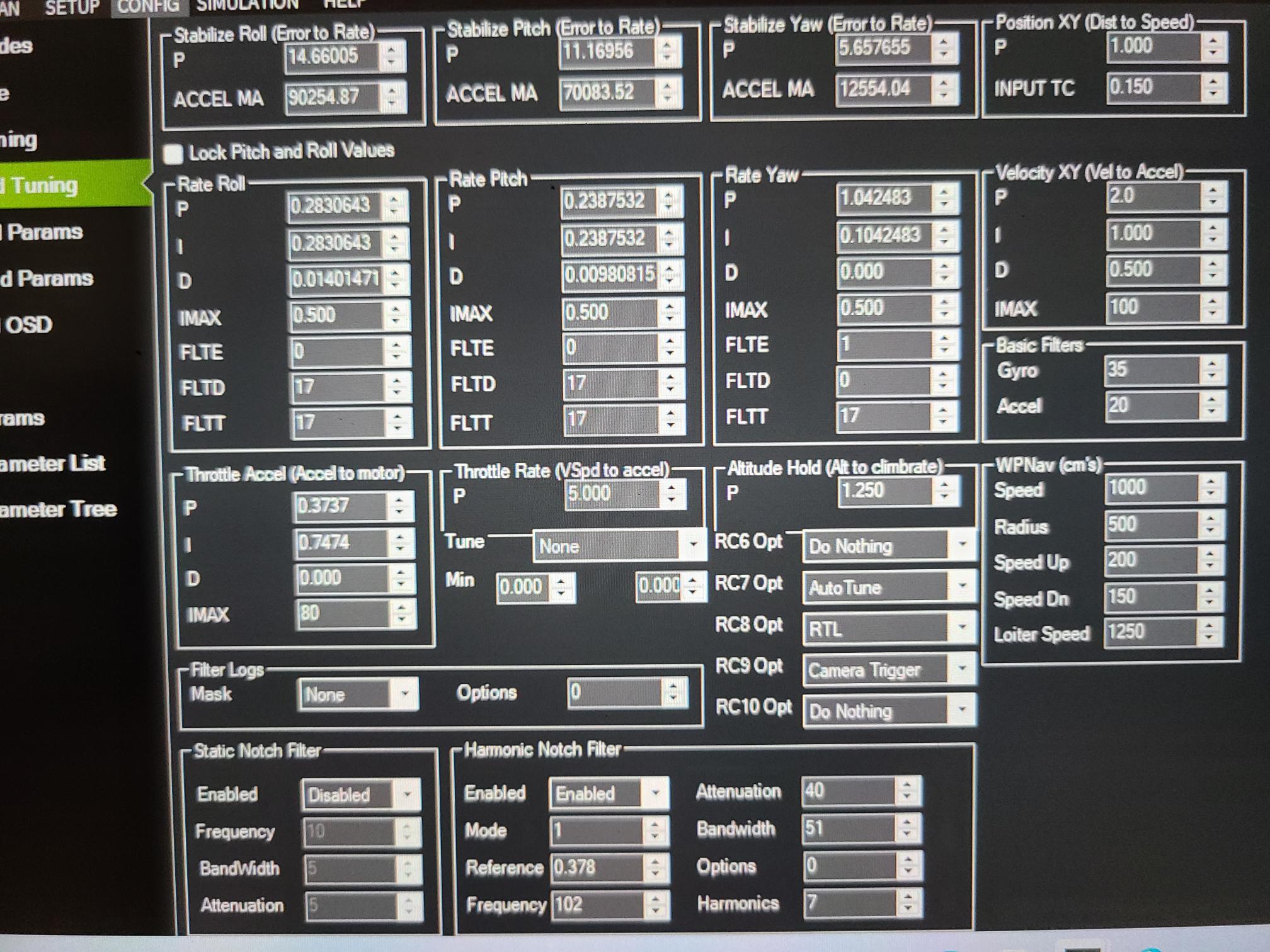
To reduce aggressiveness just reduce these ATC_ACCEL params to suit your payload, and/or just reduce them until you achieve the desired outcome. You can easily go down to 80% or 70% of their ideal and test to see what effect it has. Start with Pitch and Roll together, Yaw might not need as much change.
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
TOW = take off weight
If you keep a note of the Autotuned/ideal ATC_ACCEL values then it’s easy to put them back or to adjust for different payloads and situations.
You can even have a few little .param files to apply known values without the risk of making typo errors.
The ATC_ACCEL values dont have to be exact to 2 decimal places, you can round them to the nearest thousand or hundred, whatever suits.
Thanks @xfacta your comments are much appreciated…
I had time for a quick flight… the UAV felt much better … Here is the log
i used RTL as part of the process to be sure everything is working before going back onsite with the copter… I did not notice oscillation but may have heard it… i will be curious to get your input after evaluating the notch and the tune
one note I did drop the roll ATC_ACCEL… the screen shot shows the initial tune values…
Are you able to do more about vibrations? This is quite important. You still have some noise getting into pitch and roll control.
If you can tame the vibrations a bit more, a fresh Autotune of pitch and roll would be very much worth it. I suspect your pitch and roll rate PIDs could come down somewhat.
I would probably set these, keep the yaw P and I under 1.0 / 0.1 to avoid the oscillations at arming, even though they dont seem to be there so much anymore. See what a yaw Autotune does after everything else is 100%
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.8
Thanks @xfacta I will re run autotune tomorrow on roll and pitch saw the vibe and swaped the top set of props today with a newer set… i am hoping this will help as they were showing wear… i will post a free flight log when finished.
@xfacta attached is the flight log from this morning. Initially I thought the vibes on the tertiary accelerometer looked better though the X axis is still too high but z was not too bad - after completing the yaw axis this morning I could tell the tuning was off… but I saved and flew with a fresh battery… the oscillation when I switched to loiter was very bad. I switched back to altitude hold and landed… the previous tune handled much better. I believe the large increase in z vibration in todays flight was due to the oscillation as z was not nearly as high in previous flight. I know I need to get rid of the vibe as it causes clipping on the 3rd accelerometer… any thoughts?
here is todays log Microsoft OneDrive - Access files anywhere. Create docs with free Office Online.
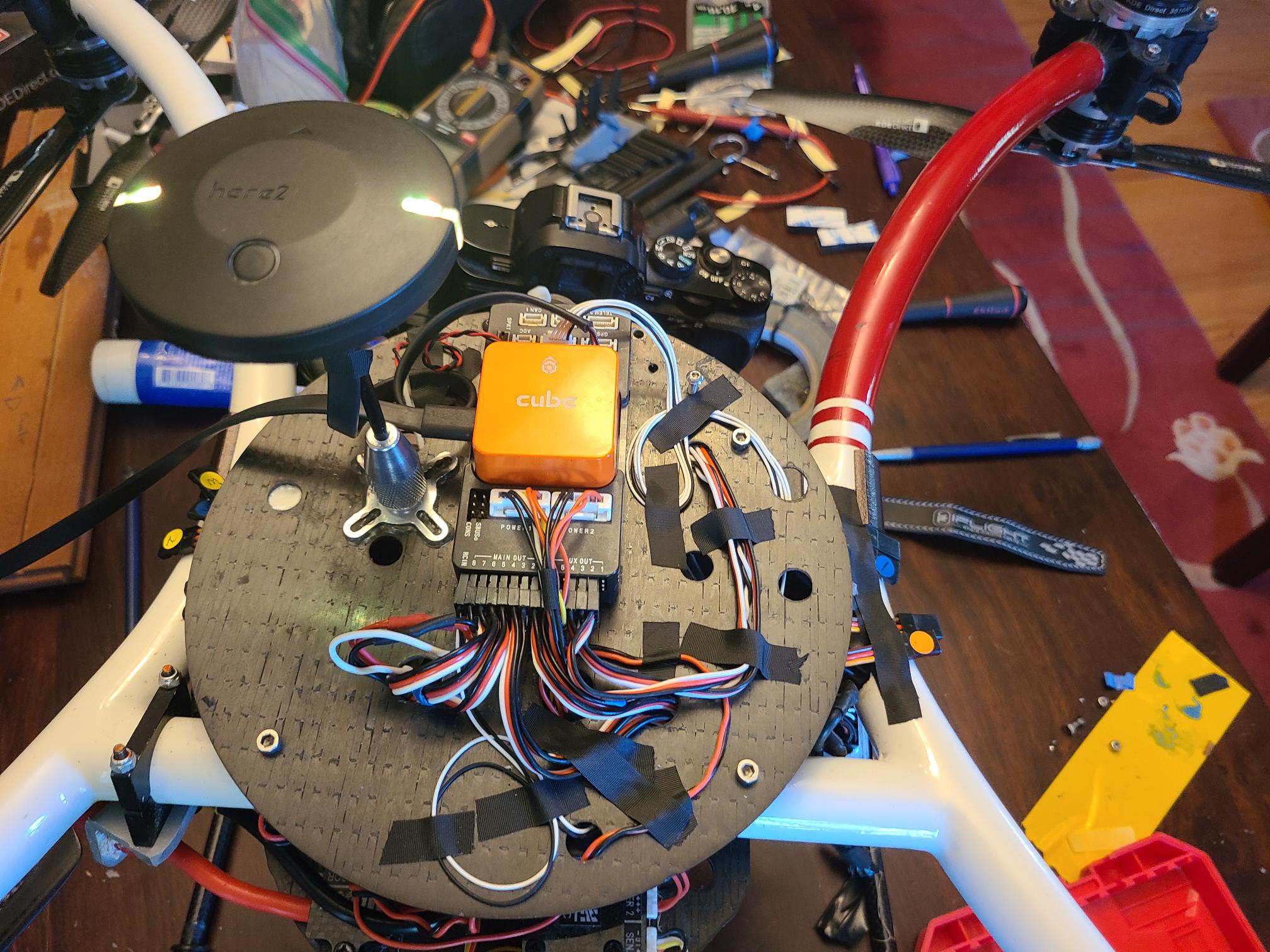
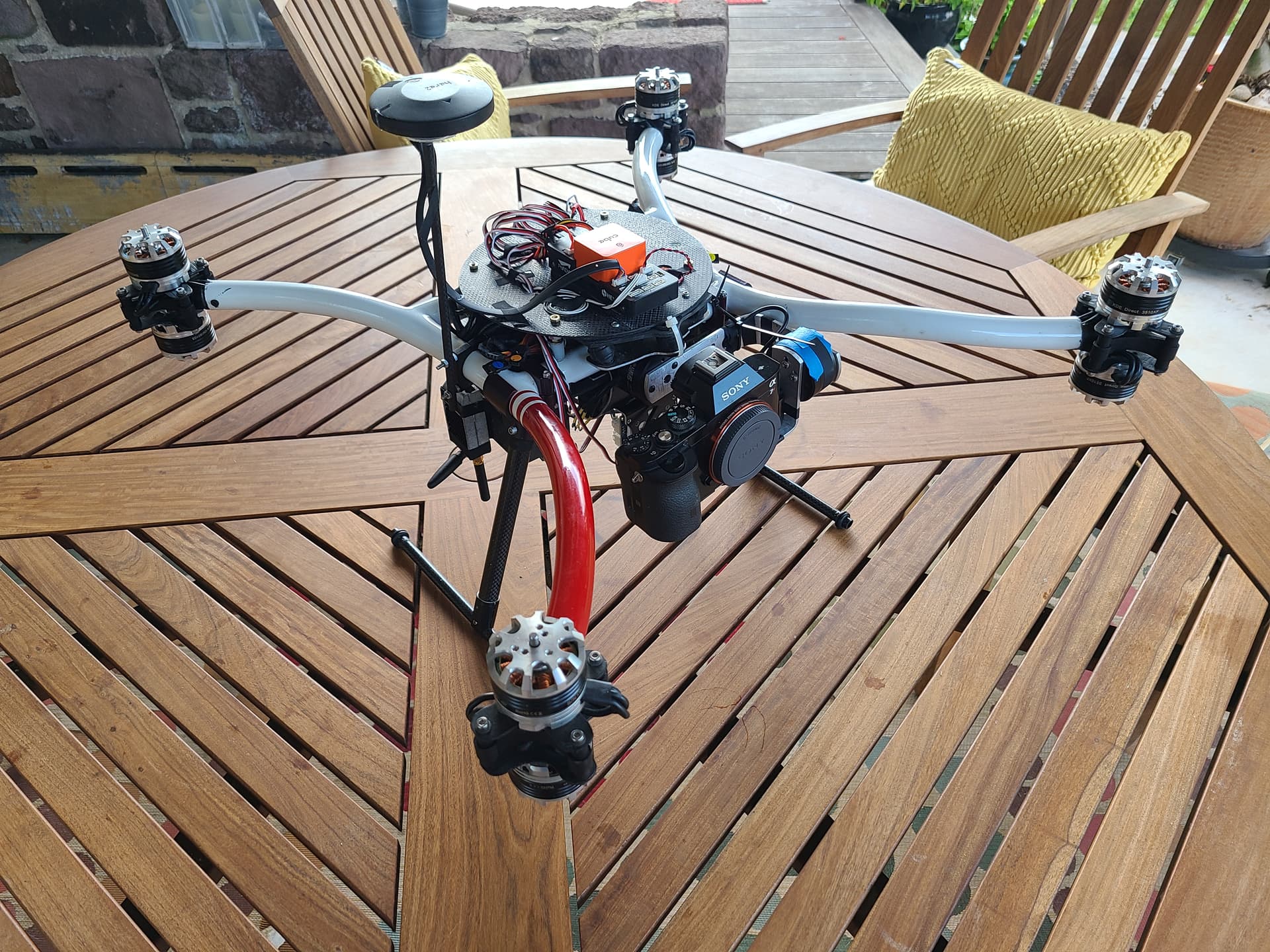
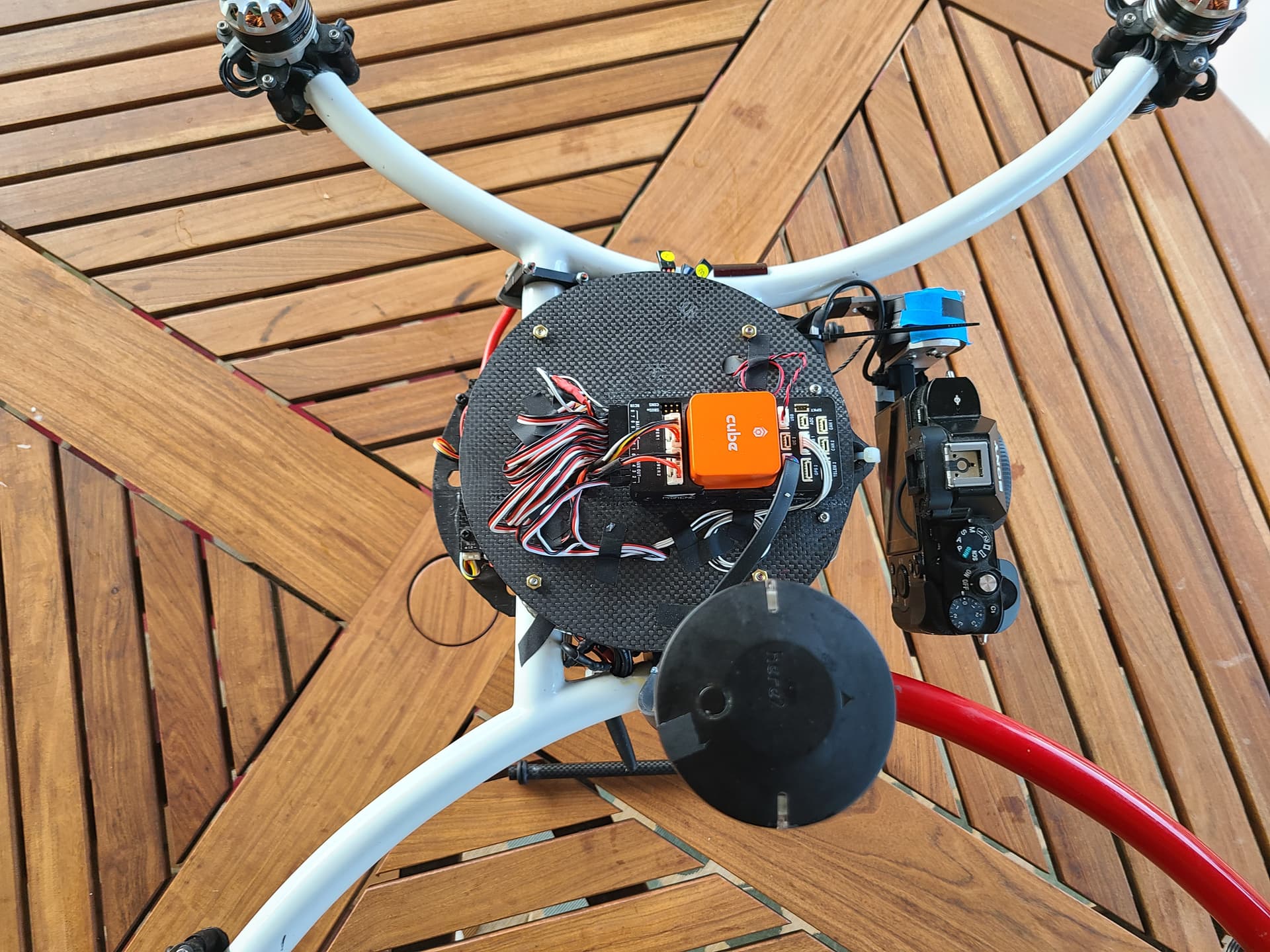
@xfacta I immobilize the camera and gimbal for tuning - it cannot be removed as it balances the CG of the copter… all my copters use this configuration - one difference however is the carbon plate on this copter is thinner than any of the others the autopilot uses 4 small 3m pads to hold it to the plate. i make the frames from 3 layers of carbon sleeve material…obviously this copter is painted
Check if the Power1 and Power2 wires have a enough slack and flexibility.
Check the GPS cable - they have very stiff insulation and I remove an extra few centimetres of the outer layer to allow more flexibility of the wires. I can see it is secured to the mast but is it secured to the plate?
All those servo wires… Makes you want to buy the Fettec one-wire ESCs doesn’t it?
That’s quite a bunch, you could start by taking out all the red 5volt wires that are not needed.
Look at using an 8 pin 0.1inch header horizontally across the main-out signal pins, and another housing with just two or four ground wires.
You can sometimes find a kit of the headers
Is the top plate actually required for strength of that frame?
If it wasn’t you could mount the whole plate using some sort of antivibration grommets, somewhat like the small flight controllers mount to a small quad.
If it is needed for strength, then look at providing more vibration isolation to the flight controller and maybe cover it too - but the props are quite a distance from the flight controller so prop-wash shouldn’t be a problem.
Thanks Shawn, good advice, the plate is not structural carbon tubes joing the curved site tubes (like a CF bicycle frame) I was actually looking into other esc for a similar more refined copter, do you have any suggestions? I wasnt sure if I could do this with the KDE esc as they are “opto isolated ?” here is there wiring guide PowerPoint Presentation (shopify.com)
@xfacta made the changes you outlined inc the 8 pin header (i actually had the kit)…
i noticed the top carbon plate (non structural) was very thin and easily flex (i.e. transmit vibration?) so I added 2 layers of cross weave… closed some holes and now looks better + not so flimsy. I now secure bottom plate and battery harness with through screws but now locked to frame cross member (no longer to top plate) … added brass screws + nuts in place of zinc in some places…moved the compass stand to frame and elevated it using a 6mm carbon rod for stiffness re-routed the wiring, added emf shielding on rfd rc control next to the esc’s… did a motor check to be sure I didnt mess up direction or number, calibrated accelorometers, and compass…will get back to tuning tomorrow as schedule permits, it was alot of work so hoping the vibration is lower especially on the tertiary accelorometer…