Rovers are fun! During our shutdown last year I had a great time driving around with FPV. Put a 2W VTX on it and really covered some ground. The same fun build/tuning process but the worst that happens is it runs into something and strips a Spur gear. On mine it’s like a mechanical fuse  and they are cheap. Auto Missions are cool. All around a fun aspect of Ardupilot.
and they are cheap. Auto Missions are cool. All around a fun aspect of Ardupilot.
Thanks for all those replies.
Good to hear (at least from my current perspective) that I’m not the only one suffering from “drone fatigue” .
Yes, one can be a bit anxious after spending all that time and money on a drone especially when build from scratch rather than buying a kit or ready made unit which comes with some certainties in regards of expected success.
As to fixed wing aircraft: Probably crashed at least 4 over the years as well. Not due to technical failure but rather due to bad combination of steep countryside, lots of trees, no flat and open area to take off and land from and doesn’t help being an inexperienced pilot when it comes to fixed wing aircraft. - Hence was doing much better with drones,…at least in regards to my piloting abilities.
I think right now will be going for Derek’s advice and put everything in a box and let some dust settle on it for a while.
Sounds like a good plan. One last word…VTOL 
Don’t go there…
…That’s how it all started:
Last year I’ve ordered a Freeman 2100 because I wanted to explore the VTOL technology now that there has been more support added in ardupilot / copter. But the actual aircraft never arrived and had to do all sort of things to get my money back after almost 6 months of back and forth and multiple failed delivery attempts. Yes, I know there is a slight issue with a certain Virus doing the rounds but companies are all to happy to sell you something and then can’t deliver. Strangely enough received the electrical components and decided to keep it for a future second attempt. So, since I had those parts sitting in a box I’ve decided to get a frame and make a quad out of it for the time being.
Well, …the rest you can see in the photo above.
There will be a time in the future when you’re again excited about it. Maintain momentum by switching to another project that is fun.
Have you considered getting into miniquads? Most of them are designed to withstand hard crashes.
Hi Isaac
yes, do have two mini quads.
Good fun indoors but rarely bother taking them outdoors as we often get a slight breeze and then those small quads getting easily pushed around. Given the proximity to trees it doesn’t take much to run into trouble if a sudden breeze pushes them towards trees. Also run into trouble in the past by trying to fly above the trees only to discover getting quickly out of range and hence loosing control.
…but here and there good fun without having to setup GS, telemtry link and everything else.
Must say been impressed that for some of those small drones you can even get spare parts.
The large quad that crashed was very powerful (total of 6kW motor power) and hence didn’t care about a breeze. In fact after flying Hexacopter and Octocopter in the past this was the most stable in loiter mode. …even with 20km/h wind gusts.
A 4 or 5 inch quad on 4S power has plenty of power to deal with wind, even a lot of wind. I have been experimenting with fast auto missions running ~100kph. And as @tenten8401 noted these can be tough little quads.
1 Like
I hear you. Lost a self build in June "Radio Failsafe - Disarming" and haven’t mustered the enthusiasm to start over, yet.
Hi Dave,
that’s interesting to hear. In the past I’ve had plenty of GPS related issues (glitches, drop-outs, processing delays,…) on various drones with different configurations during missions just doing around the 25km/h range. So to to hear that you manage that at speeds of up to 100km/h is rather impressive.
Especially looking at the maths of it: If flying at 100km/h that equals about 27.8 m/sec. Most GPS these days run at 5Hz despite claiming that they can do up to 10Hz (ideal case). The older ones only did 2Hz or just 1Hz. More than 10 years ago it was a struggle finding those doing reliably at least 1Hz. So, back to the calculation,…with a GPS doing 5Hz you would cover (27.8 divided by 5) =5.56m. That doesn’t allow for much of a safety margin at that speed because if you had for some reason a GPS glitch lasting just 2 seconds the drone would have already covered over 55m in distance without really knowing its actual position.
…As mentioned, impressive.
Anyway, appreciate the input but all my past drones and batteries been 3S and the latest one was 6S. I don’t think I would currently be inclined to start all over with 4S now. Besides, for the first time managed to get past the 20 min. flight time mark on that latest drone build and was considering changes to get closer to the 30min. mark. (…until that crash happened.)
There have been several improvements in the latest releases giving stability to high speed in assisted flight modes.
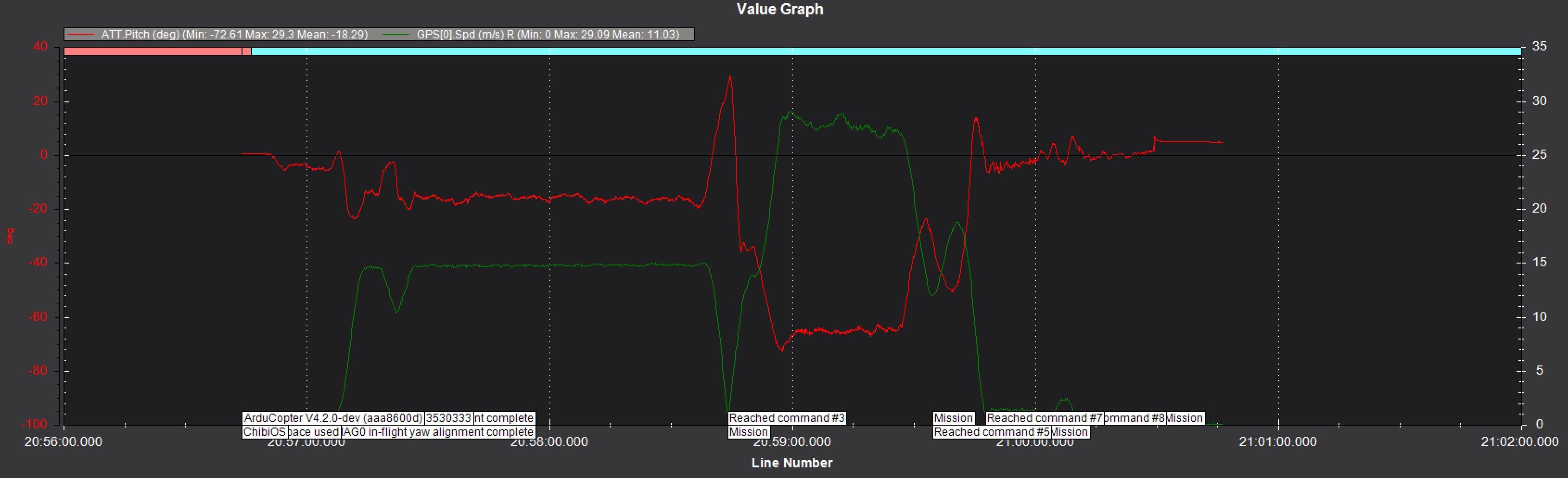
Here is one trial mission I did on a 5" last week. ~70° pitch ~30 m/s. It’s about all this quad will do. I have a 4" that’s a bit faster but still doing some fine tuning.

Cool, and that was an actual mission ?
So far I only managed about 55km/h on my hexa which at the time had 4.0.7 running on it. (manual flight only) Now I’ve got the old APM on it (…hey, I know what you’re thinking, but at least I can still fly that thing rather than having to spend yet more money on another FC)
…But certainly wouldn’t even think trying to fly such a speed in a mission on APM. 
Anyway, that new quad made it to 80km/h to my surprise (also manual flight,…as in Stabilize).
Usually don’t care about fast speeds as I been using drones for more practical matters like live video footage, object detection and most recently using a FLIR camera in order to detect feral animals on property. …So in other words more practical use for farm related work.
…Just had a look for the .bin file, but appears I’ve deleted it already. However, the GS data file was still there:
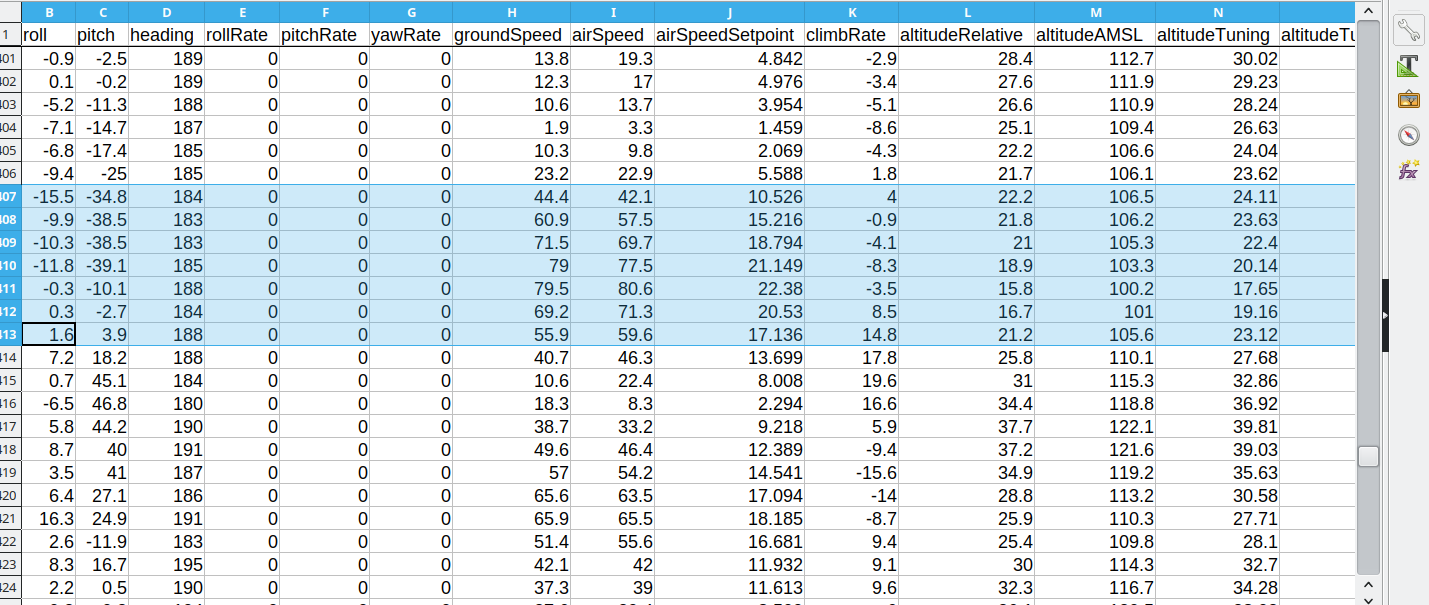
Yes, actual mission. The log is on a High Speed Auto Mission thread here.
APM wouldn’t do it. In fact you need at least 4.1.0-beta7 to attempt it.
How is it going in regards to WP overshoot? I believe that has been often an issues when flying missions at a fast speed.
Or did you use only spline waypoints?
This is no longer an issue with S-curve navigation which has been in the Beta releases for several Revs. 4.1.0 Stable is probably very close (at beta8 now) which will have it. No Spline Waypoints.
I feel your pain ! Some of the reply’s recommend you switch over to plane .
Thats what im into and I can tell you that is far from pretty either !
Last time I flew I had throttle stop responding in flight . I crashed trying to land with cruise throttle setting
but that was better than letting it get lost . I still dont know why it happened .
Between the ever increasing complexity of ardupilot and legendary chinese quality I also would say
the reliability overall is nosediving !
I just got thru building nano talon with h743 FC . I have this thing all setup and tuned as best I could on bench , getting ready to fly .
Once again arduplane says not so fast . Mysterious problems that come and go seemingly at random
is frustrating .
Now I cant arm or disarm outside of mission planner …nothing has changed , it was working fine . There is absolutely no reason for it to be happening ! Also smart audio control only works SOMETIMES !
Once again for no reason .
I go back to the balsa wood days with 72 mhz . Back then we actually managed to make it out to fly once in a while …
Now Im anchored to a workbench playing computer scientist !
Hope it works out for you
Hi Ben,
yes, have to admit I had less GPS related problems with my old APM 2.5 FC compared to now in recent years. I guess one of the reasons is the GPS back then only worked with the regular US-GPS. But these days the GPS units have US, Russian, European and Chinese based GPS systems as source of data, whilst this sounds great it appears it causes at times a “GPS-system overload”
There are many reports dealing with this issue, here are just three:
But in all fairness I have to say many years ago with plain RC flying there have been also various issues, but have to admit more rarely if you’ve looked after the aircraft well.
,a friend of mine totaled once a glider with 3m wingspan. The cause turned out to be back in those days you could have a balsawood arrangement with some wires at the end to operate your control gears via the servos. In my friends case for some reason the balsawood section must have had a crack and suddenly gave way mid flight. As a consequence the elevator snapped into nose down position. …all that was left was a bag full of rubbish.
Regarding the reliability, from my vantage point it has gotten better over the years. Its tough because the software supports an ever growing list of hardware. Back in the day it was just the APM then Pixhawk. I give the developers a lot of credit. They put time into hardware that only a few people use, or that they don’t even have to refer to. Sometimes I wonder if they’re machines, I’ll come back after posting something and there will be a reply and a PR with the issue fixed. Like yesterday, holy cow I just went to the grocery store a fix was coded up for the firmware server while I was gone. Yuri coded some new features into Missionplanner and before i could read what they were, they were included in beta. There is amazing work going on here that we shouldn’t lose sight of. I hope people aren’t too hard on issues they find, the team really seems to try their hardest to avoid problems and fix them when they come up. I know its tough because after a crash there’s lost money and time but everyone is trying their best.
3 Likes
I don’t think the GPS info is relevant today when even relatively cheap modules support 3 constellations. I have a GPS module on 3-4” quads that work very well.
Certainly not complaining about the dev team. Been impressed with them and what they’ve achieved. Also the fact that so many stuck with it for all those years.
But I think it is the fact that there are so many supported FC’s and also now various platforms in regards to MP that are being pushed, that it makes it really hard to get it right for all platforms and combinations possible with various sensors and communication technologies that are now in use.
As in reply to Dave:
I think the GPS issue is in fact still relevant given that you start of with 17 satellites and HDop of around 0.7 and then suddenly get a “GPS glitch” message just after one minute of flight. Then a few seconds later problem appears to be gone only to get a “EKF variants” issue apparently linked to compass despite having two on my FC. If that wasn’t bad enough half a minute later yet another GPS glitch and within seconds another EKF variant issue - this time related to velocity sensor! Given that nothing has changed in regards to speed, height and surroundings, no interference from a close by transmitter source as this happened in a rural location with the nearest house with any sort of technology being 500m away at the time and location where it occurred.
The me that sounds like the tell tail signs of a processing delay either in the FC or perhaps the GPS unit itself causing it as there been various reports about improvements in regards to refresh rates and signal reliability from GPS once only a limited set of satellites is being used instead of all.
…But then again this may just be specific to Navio2 / Rpi FC arrangement as Sebestian mentioned above.
That’s why I find it rather impressive that Dave can achieve very fast mission speeds without a GPS glitch yet I can’t reliably fly a mission at just 25km/h. (I’m on …well, was on 4.0.7)
Anyway, here is one GPS related report from just earlier this year which highlights that there have been still issues. (Can’t speak for the latest beta version as haven’t tested that one ) ( As mentioned may just be related to Navio2 FC)