Copter Climbing at full throttle for around 3 seconds when stitched to Altitude controlled modes(Only if Takeoff in Stabilize).
this will not happening if takeoff in any altitude controlled modes.
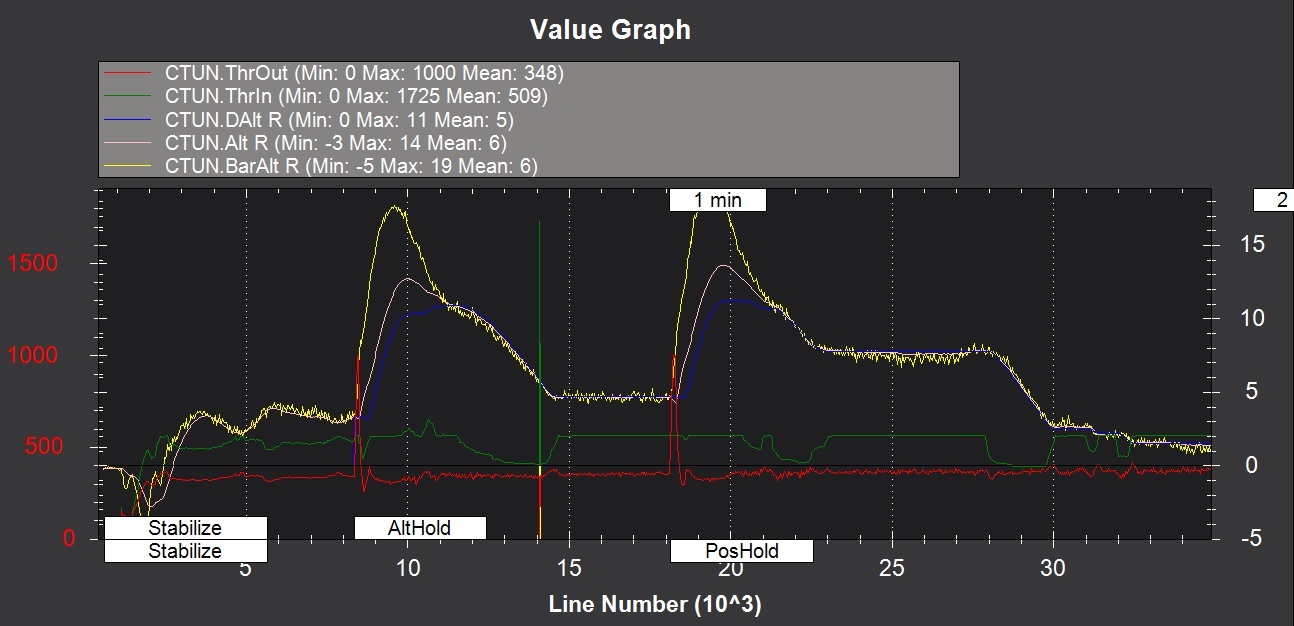
Here is the flight log sample
Copter Climbing at full throttle for around 3 seconds when stitched to Altitude controlled modes(Only if Takeoff in Stabilize).
this will not happening if takeoff in any altitude controlled modes.
Here is the flight log sample
Looks normal to me. If you rise up rapidly the barometric pressure will increase because of the wind pressure on the top of the copter and the propeller wash. When you switch modes the copter will stop climbing and the real air pressure will be seen causing it to level off and the altitude to increase as shown.
Also you may have to tune your dead zone when switching between Stabilize and Alt-hold or Position-hold based on how powerful your copter is.
Mike
but the situation seems too dangerous most of the times and it will climb up to 10 to 15 meters,
Throttle stick is modified to feedback from middle style(just like all other sticks) that will return to middle if i released,
Copter is a bit overpowered but the THR_MID is adjusted to hover well with mid throttle in stabilize.
also this happens if I switching from althold to poshold and back.
What version of the APM are you using. There was a reported bug that causes the last throttle position to stay when switching out of that mode. That was corrected in 3.3.3.
Mike
Arducopter 3.3.3 Quax X
I have that same configuration. Let me give it try and see what it does.
Mike
After several test I did not see what you were seeing. I used a Pixracer with 3.3.3 and open area above pixracer.
https://onedrive.live.com/redir?resid=9E0CDC793EC9176D!279&authkey=!ALwlUeAs2J3nur8&v=3&ithint=photo%2Cpng
Mike