Today I was working through autotune on my Tarot X4.
After completing autotune for roll, I shut down and re-booted. Then flew again where I completed autotune for pitch. On that same BIN file (no reboot) I then started a flight for autotune for yaw.
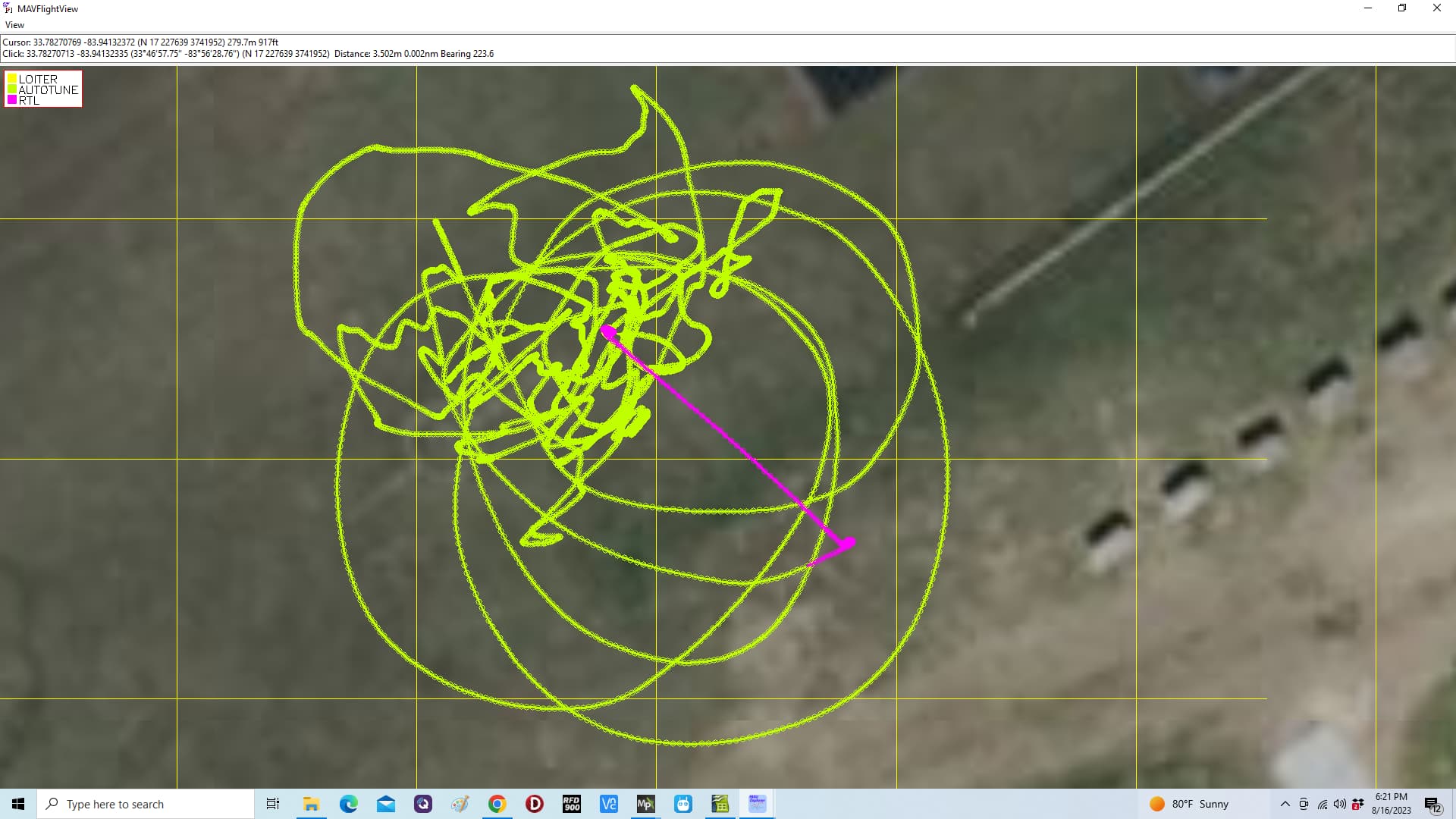
After completing just a few twitches for yaw, the copter began flying in a circular path - and didn’t re-settle into a position to do more yaw twitches. After several circles, I elected to RTL and land without completing the autotune for yaw.
I use loiter when I autotune to keep the copter in position - and always autotune on calm days.
I’ll go back and try again tomorrow. But I thought I’d share this in case anyone is interested.
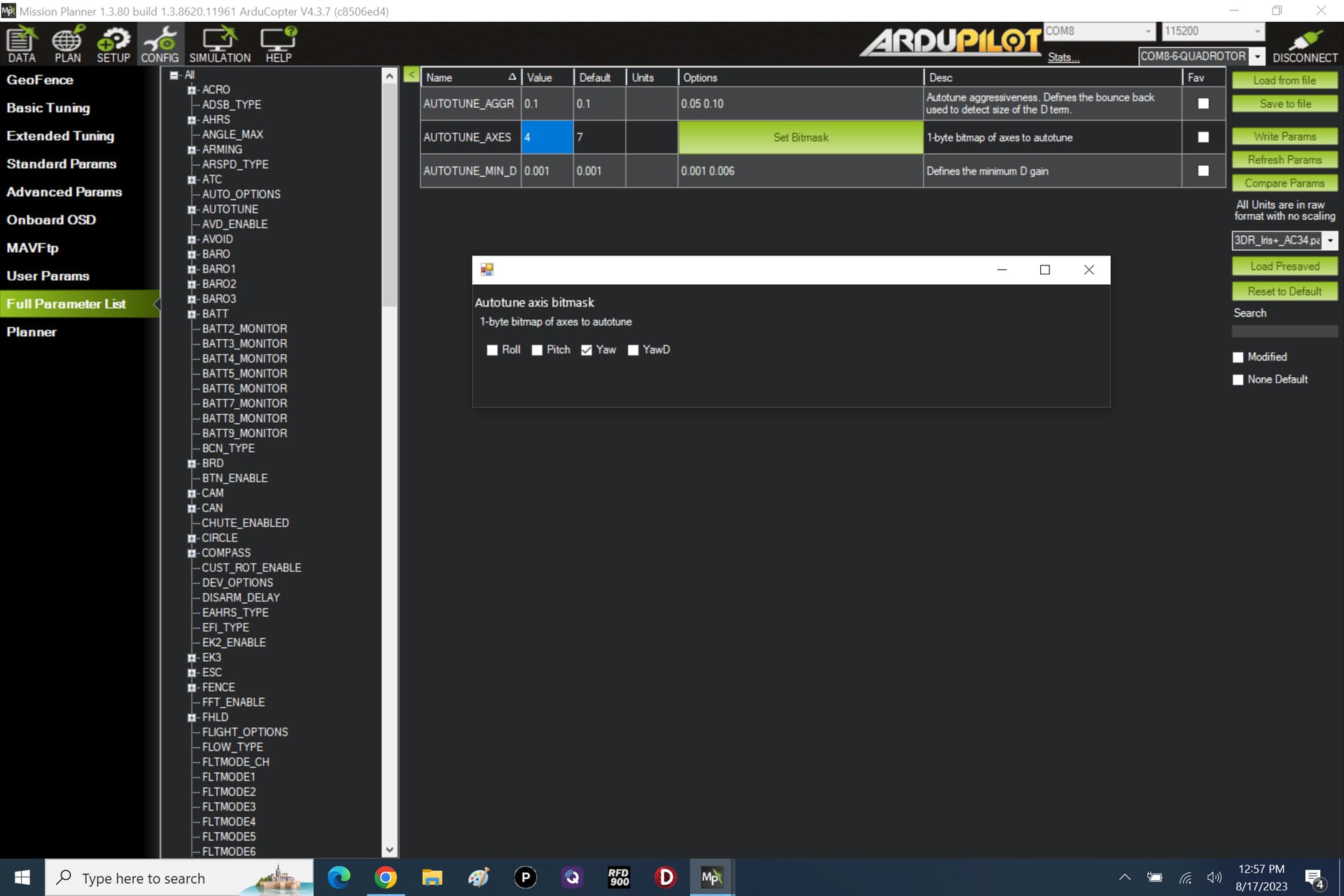
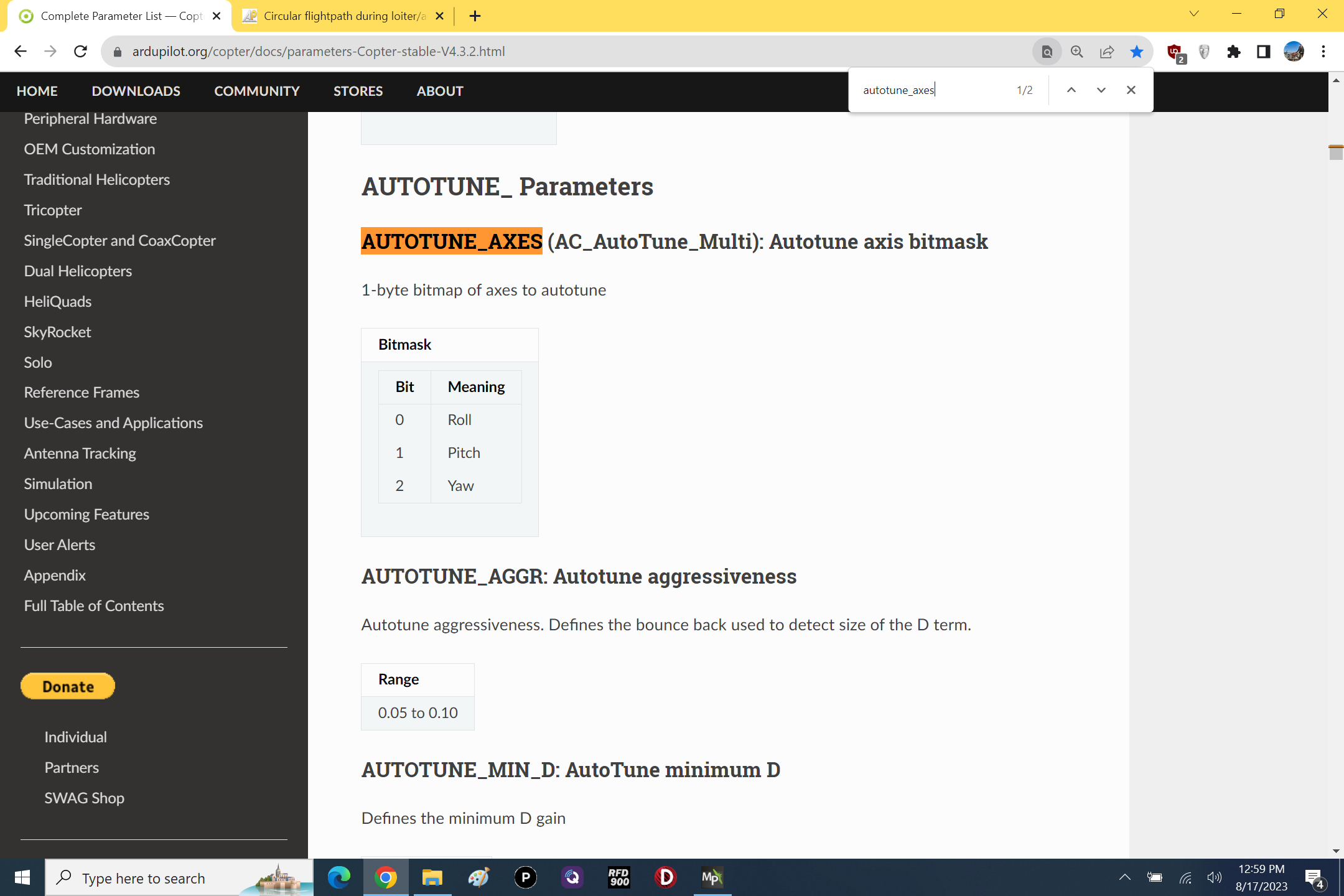
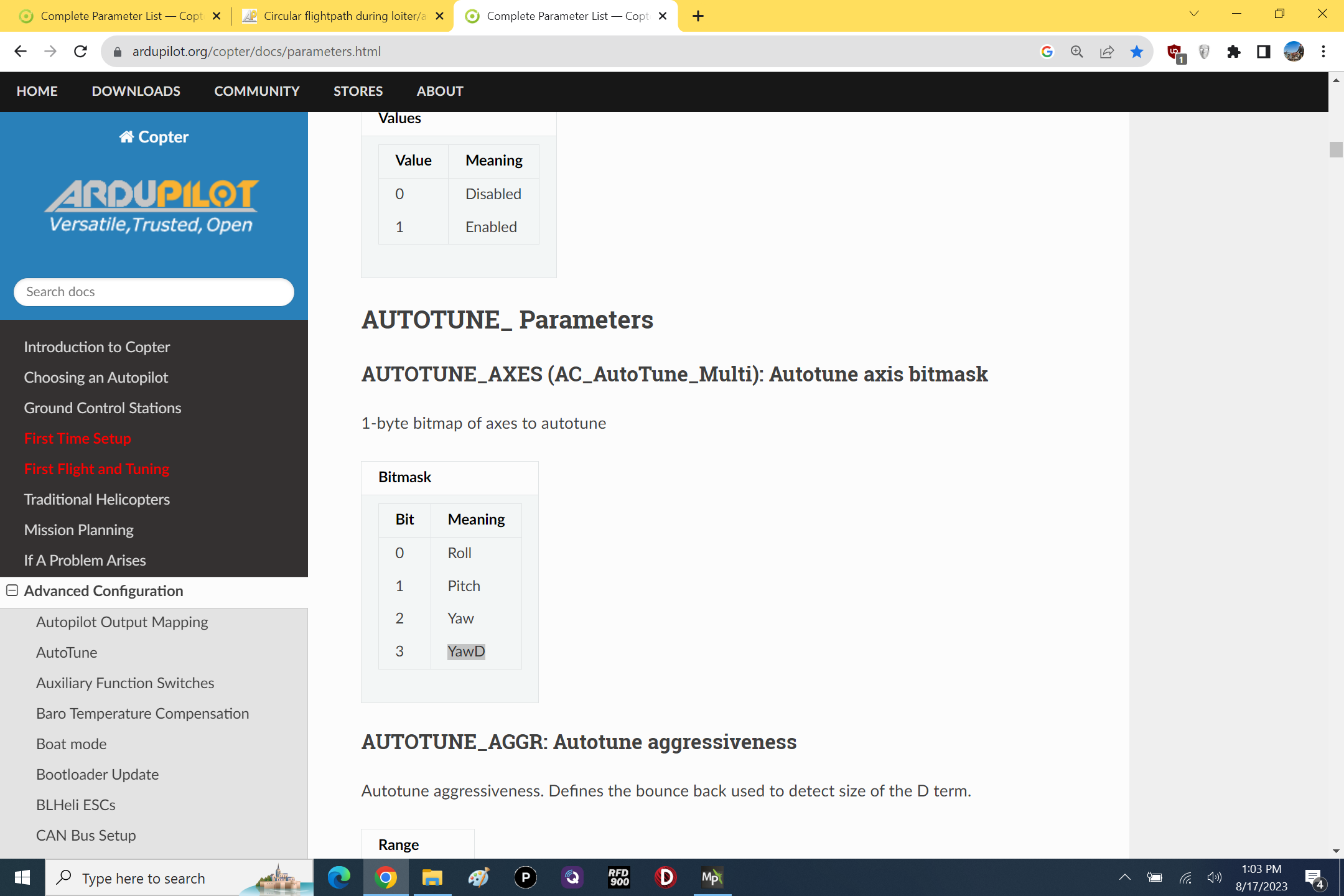
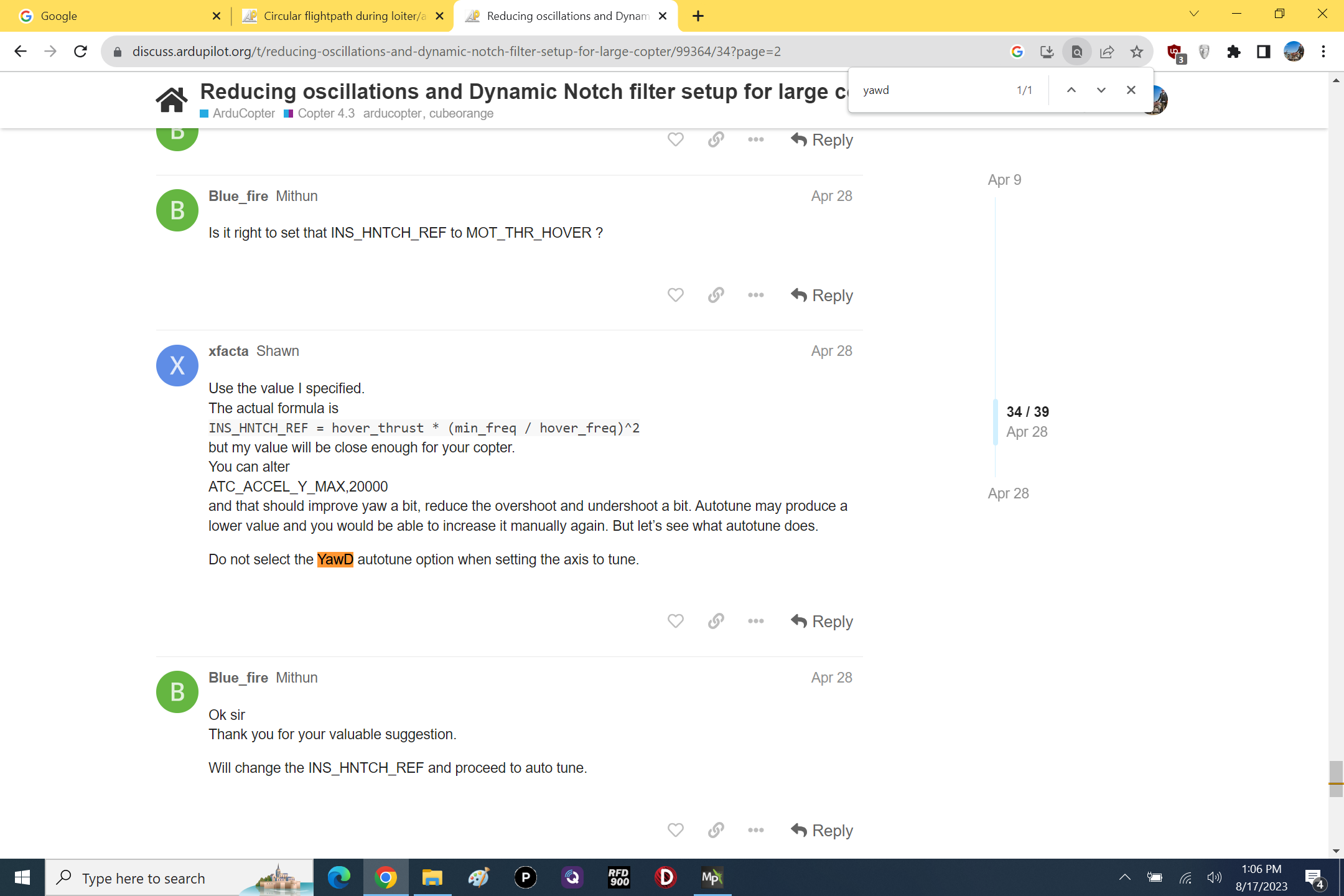
Just checking… Did you have Autoune set to tune Yaw D by any chance?
You can but it’s usually only needed for increased yaw authority and you would set this before starting it: ATC_RAT_YAW_D,0.001
Vibrations are getting a touch too high in Z axis, but a non-autoune flight might give a better example before declaring that a disaster waiting to happen.
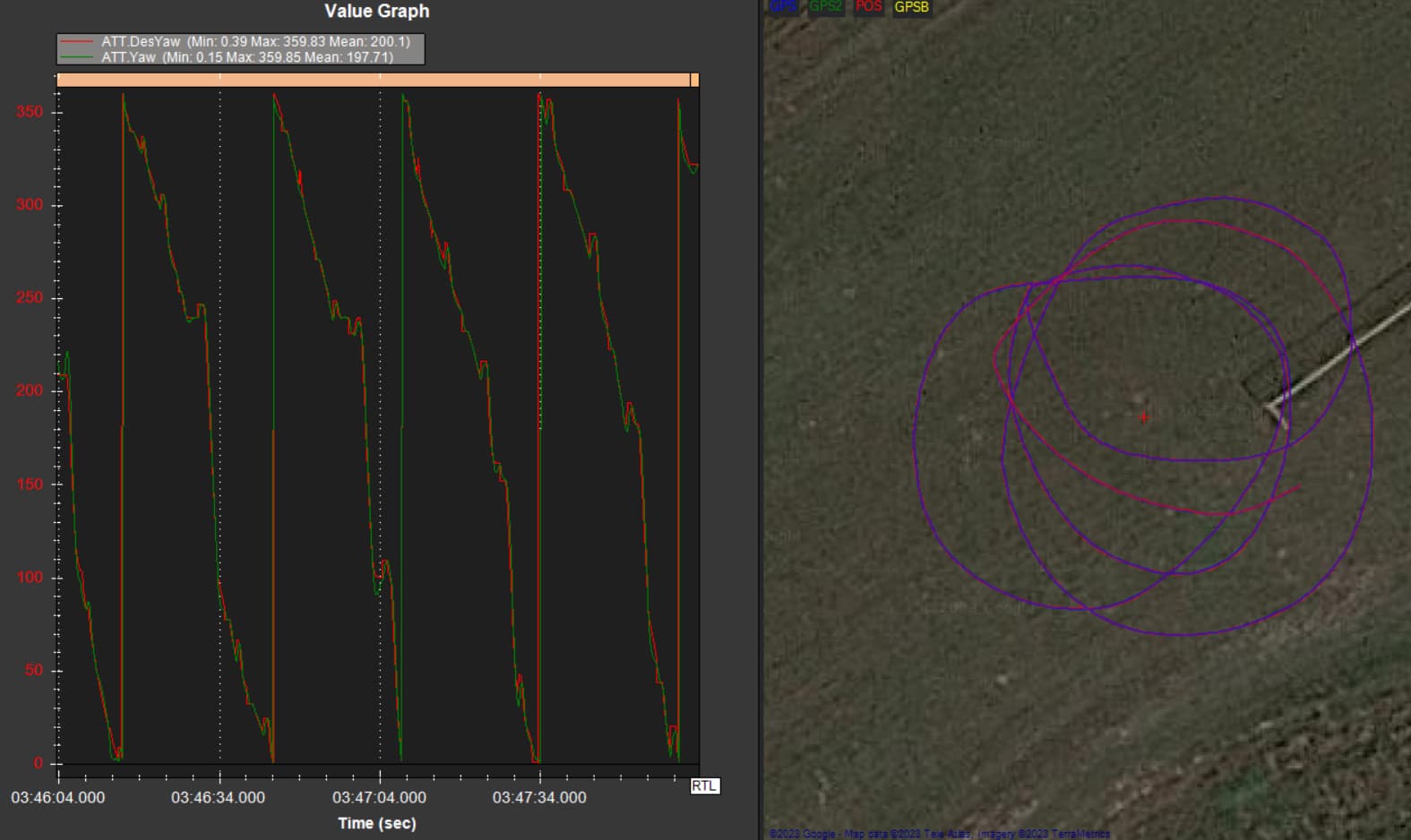
Otherwise Yaw Auto tune is just doing lots and lots of small yaw steps in one direction, which is a bit odd and I cant fully explain it. Maybe it was stuck trying to adjust a value that wasnt responding as expected.
I don’t understand what you mean by did I have autotune set to tune “Yaw D”.
It was set to autotune yaw - I’m unfamiliar with a “Yaw D” option.
When I go back today I think I’ll just try tuning yaw from Altitude-Hold instead of Loiter. That might provide a better clue about this.
You’re absolutely right about the Z axis vibrations. They seem to be getting worse. I’ll spend some time in the workshop to see if I can figure out what’s flopping around. BTW - I did the auto-tune flights with the gear down - as the vibes seemed to be worse with the gear up. Of course I’ll have to change this. But as I don’t really need to retract the gear, I thought I’d set up for the best chance of success for now.
The Yaw D Autotune (or manual tuning) can help where copters need a bit more yaw authority. For example a small copter with a relatively heavy camera, you want to be able to point the camera effectively, and have it stay pointed.
This feature does work well, but there is a bug where starting it with the default of ATC_RAT_YAW_D,0 can cause an issue. If you set ATC_RAT_YAW_D,0.001 it works OK. It will be fixed I’m sure but I’ll have to look up when.
Generally you wont need to run the Yaw D Autotune.
Ordinary Yaw Autotune is fine.
Just set these to begin with
ATC_RAT_YAW_I,0.05
ATC_RAT_YAW_P,0.5
for your copter since it had that weird circle issue.