I recently installed a BN-880 GPS / compass to my quadcopter running ArduCopter 4.0.3 on a Pixhawk 2.4.8. It connected fine and I was able to do all the calibration steps (including attaching battery to do ESC calibration).
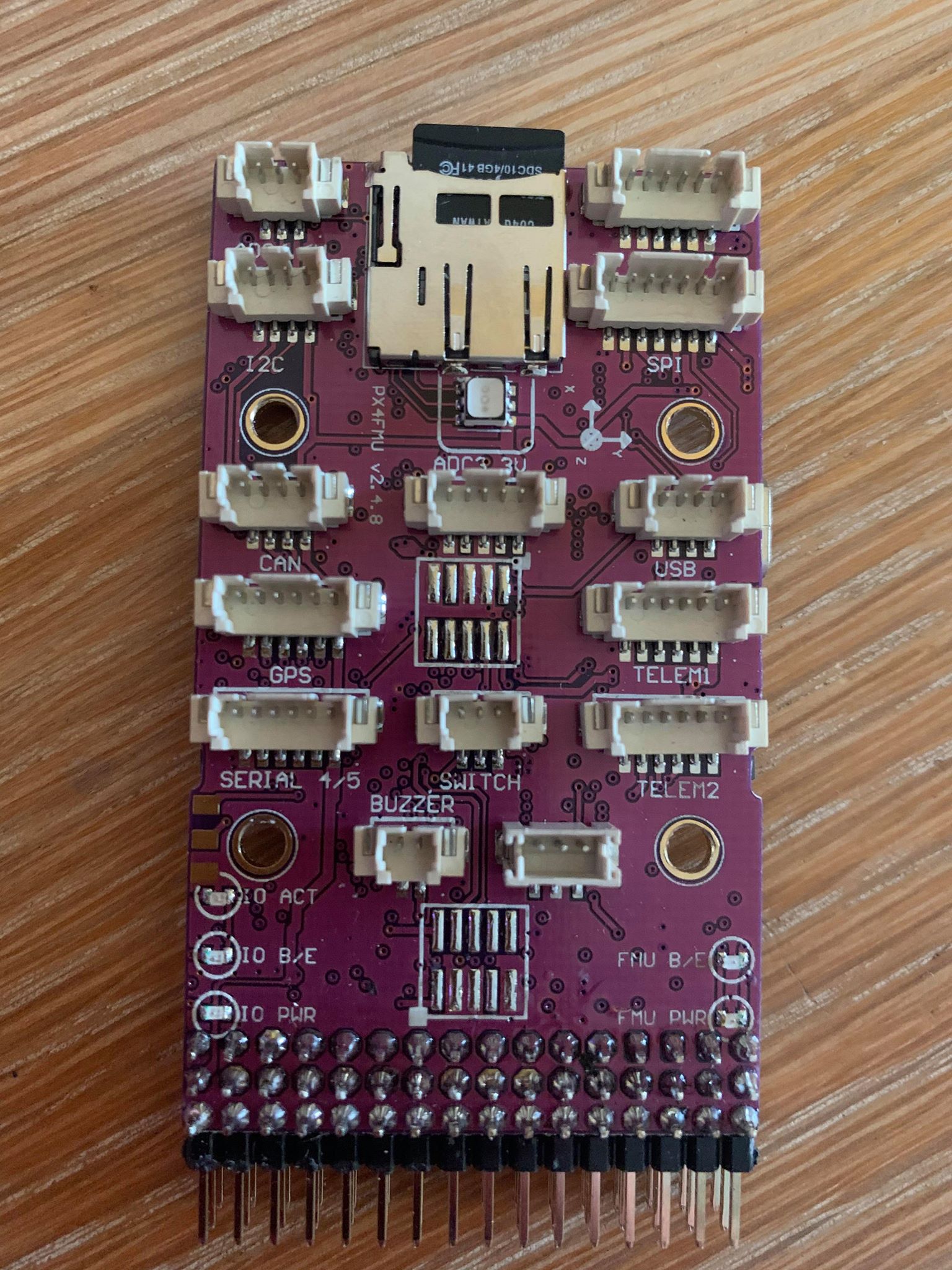
I then attempted to do the motor compass calibration so plugged in battery. At which point the Pixhawk refused to boot. I connected to Mission Planner and get the error: ‘Check BRD_TYPE: Failed to update IO firmware’. I have attempted to flash the Pixhawk since this but it does not fix the issue.
Good day, Just check also the parameter in advance option trees BRD_TYPE and if it’s not corresponding to your fc you must set it correct.
If your parameters are correct and you still have problems, while pixhawk booting press the safety switch and keep it press as long as it will emit a tone., after this disconnect your fc and connect it again on MP.
Just check also the parameter in advance option trees BRD_TYPE
Another solution is flash px4fmuv2 or px4fmuv3 and proceed like before
My BRD_TYPE was set to 0 (auto). I set it to 2 (Pixhawk) and rebooted but with no change.
I attempted holding the safety switch for a long time however heard no tones from the buzzer.
I have already attempted flashing the Pixhawk with fmuv2 and fmuv3 through qGroundControl (unable to through Mission Planner as get error cannot connect to board for some reason) however the problem persists.
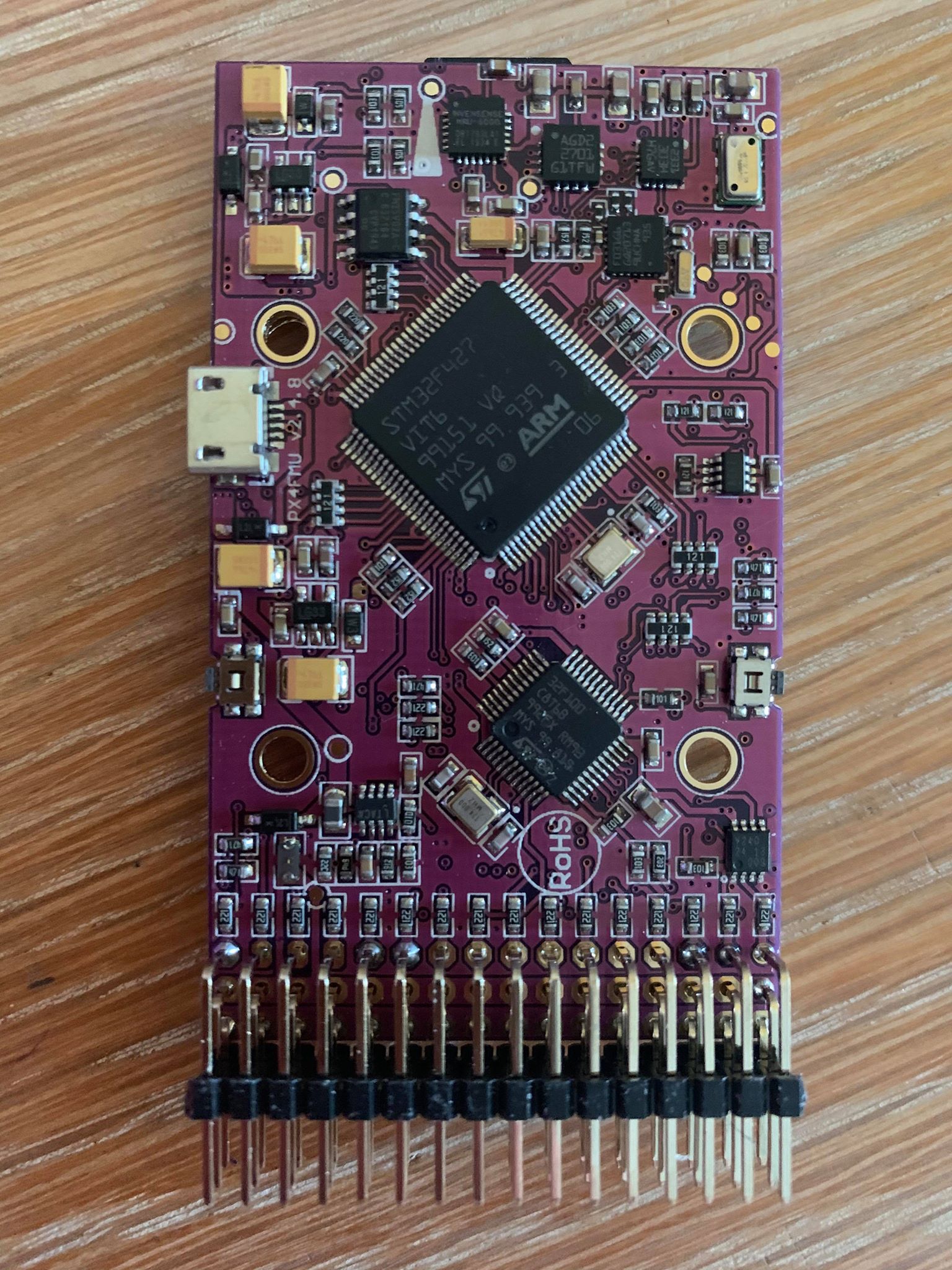
Could my Pixhawk be damaged? In the past I have had problems with my Pixhawks randomly frying (white smoke). I thought I had fixed this as I changed most of my quad components apart from the PDB / power module. I saw no white smoke this time.
Did you try flash px4fmuv2 or px4fmuv3 firmware and while booting press the safety switch?
if you have saw smoke coming from your pixhawk im sure few components are damaged.
The issue occured the second time I connected the battery. Before that all I did was calibrate magnetometer then compass then radio.
I did not run any bootlader updates that might brick the board. What is concerning is that I can connect to it on Mission Planner. Could be internal damage?
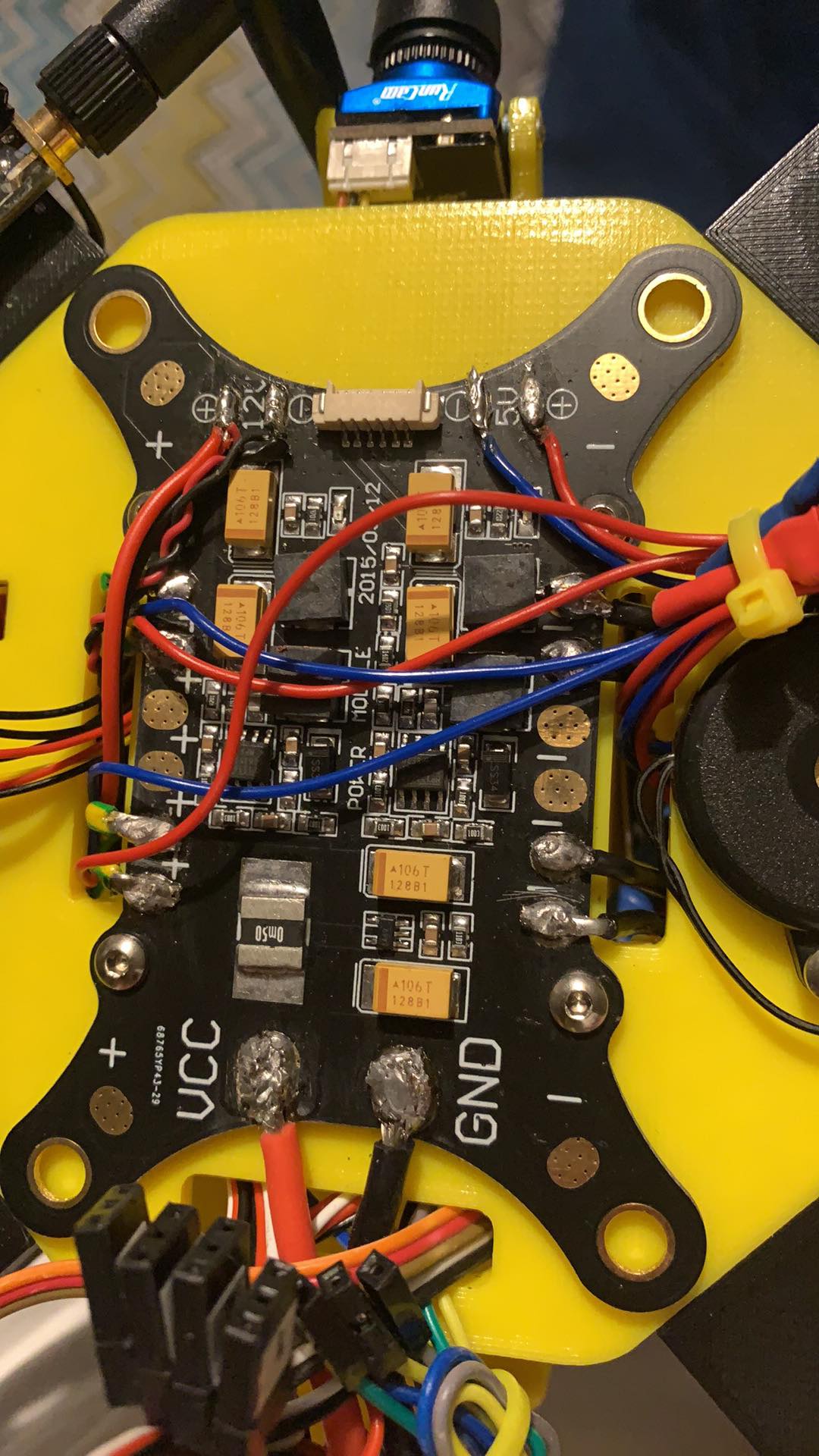
It should be providing the Pixhawk with 5V to power it. Most of the time it does this fine, however I have had in the past random events where the Pixhawk pops and white smoke appears. Until now I did not suspect this board to be the problem. There is a louder spark heard when connecting through this board than when connecting and powering through a traditional power module. What I think it might be is a voltage spike upon connecting a battery that causes the Pixhawk the blow (spike possibly due to this cheap board).
Pixhawk support without any problem the 5.32volts…if there were a spike over that voltage the pixhawk xsn be damaged. I don’t have use that kind of board… ive always use i different power module adding a capacitor with a Zener diode . My guit tell me that your pixhawk is damaged.
What is the purpose of adding a capacitor with a Zener diode?
I also think it is damaged. Will have to send it back and order a new one and only use the PDB for power to ESC’s / gimbal in future and use the proper power module that came with the Pixhawk.
The capacitor help for remove noise in circuits, to eliminate voltage surges,the Zener diode used in reversed polarization work as voltage regulator, this system is used when you have to power the servo rails… pixhawk have 3types of power redundancy.
Its more useful add a capacitor on the pdb positive and negative to eliminate voltage surges.