I recently loaded 3.1 into my APM 2.5 without first doing the erase and reset, Yea I know… the result was pitch or roll channels reversing after changing flight modes. No big deal, this was a tethered test.
So… I erased and reset the board, loaded 3.1 and re-calibrated. Problem solved! Or so I thought…
FYI It flew quite well on stock PID’s.
On the second pack, I ran auto tune for the first time ever. After a successful completion I switched from alt hold to stabilize. It seemed to have pitched forward a bit, but I wrote that off due to pilot error and sweaty palms. Brought it down, disarmed, and all was well.
Flew another pack, amazed at how well it flew, when out of nowhere (didn’t change modes) it pitched full forward and would not respond. I chopped the power, taking out my $85 Quadframe gear and then sliding into an inverted landing in my neighbors driveway.
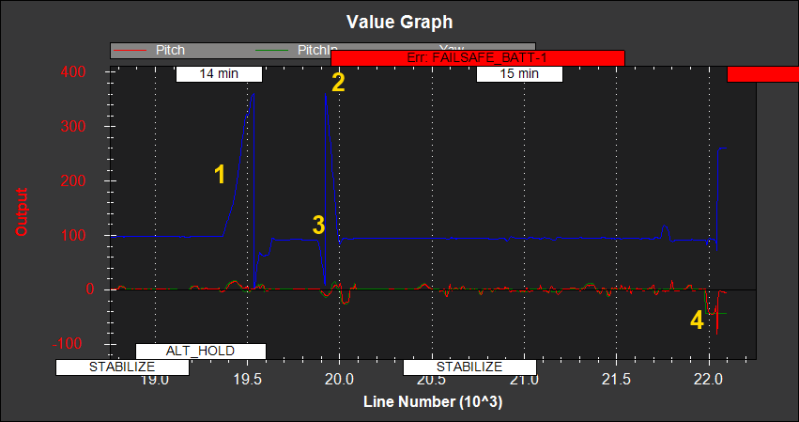
I pulled the log and at the end of this flight RC pitch_in pitches full forward and pitch_out followed it quite nicely, good auto tune.
That’s what I know… Here’s what I’m not sure of… I can’t recall where I had the pitch stick… I assume that I would have pitched full back to counter… Or, in the panic froze and only chopped the power. I dunno. I THINK the channel reversed and I inadvertently flew it into the ground trying to save it…
This is a X hex that has never misbehaved… The only changes made were upgrading to 3.1 and switching from PWM to PPM on the Taranis/x8r with the FrSky converter. Could this be a radio issue? Could the APM be having issues with the PPM signal?
Sorry for your crash. I’m no expert and could be completely wrong but here’s my 2c (see the attached image):
You rotate the copter (1) and rotate the copter again (3), then there a battery failsafe recorded (2) - did you have it set to RTL on battery failsafe?
At some stage I suspect some disorientation occurred because when you went full back on the stick I think you thought it was facing 180 degrees to what it was, so that and the lowering of the throttle caused the crash.
The log shows the copter clearly went in the direction it was commanded, ie ‘PitchIn’.
It wasn’t a orientation issue, the front of the copter suffered all the damage…
and to the best of my knowledge, I don’t have any of the failsafes set.
I’m leaning to a radio issue. After looking at another log I could see where the APM received a few very short full pitch deflections,
I was looking…, no staring at the radio calibration in MP and could see the the pitch channel fluctuating.
I found that the pitch stick would not center. I opened up the Taranis and could not do any thing to remedy the problem so I just changed the gimble location. While I was poking around in the radio I found one pin on a large connector on the main board that was slightly exposed. Not quite a smoking gun… but it could the issue. Unfortunately I forget which wire it was… and I didn’t test to see what happened if the wire was disconnected.
Now I just need to devise a way to test this thing without putting people or property in harms way.