Hello,
the aircraft is Skywalker X8 and the firmware ArduPlane 4.4.0. After several successful transitions, the last one proved to be less successful. The airplane did not reach the required airspeed (the airspeed sensor present and connected but not enabled). I got confused and accidentally have switched to the MANUAL mode which resulted in falling out of the sky and (not very serious, already repaired) damages. My bad, this mode must be secured by some more sophisticated combination of switches.
My obvious error was not pushing the throttle stick forwards. It has remained more or less centered, where it has provided hovering in the VTOL mode. Question: is there an option allowing for automatic full throttle when the transition has started?
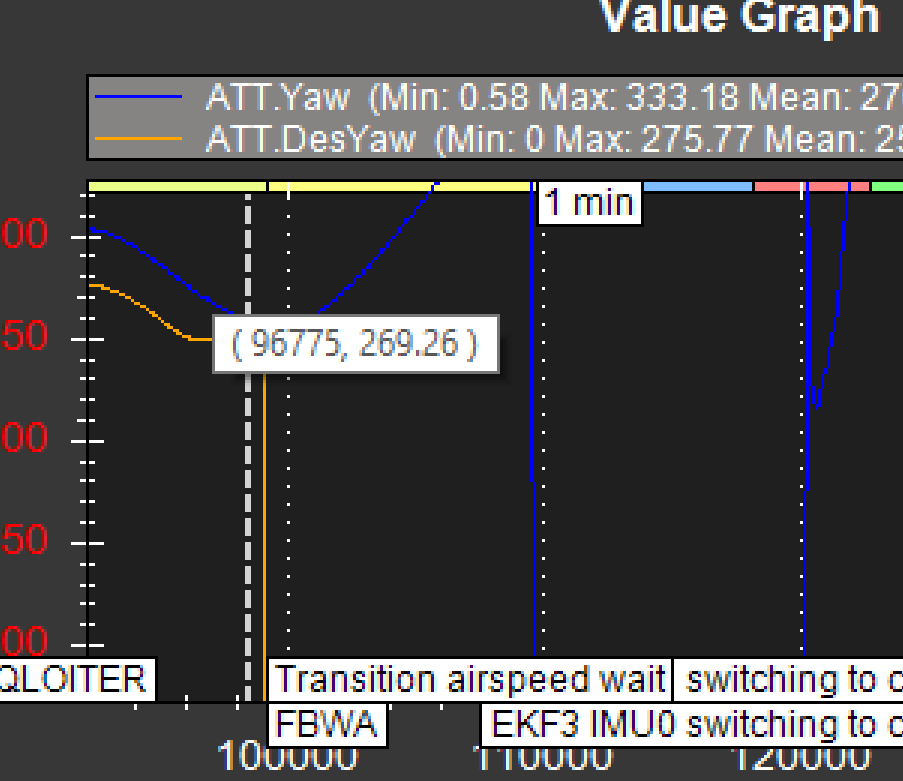
But there was another problem. The aircraft has changed the heading, what (my guess) resulted in the drop of the airspeed during the transition. What was the reason for that? This time I’ve launched not directly into the (light) wind, and after the turn it finished flying downwinds. But was this caused by the some yaw applied during the transition? I’ve thought that the yaw input is inactive for the flying wing during the transition, and controls the rudder in a classical plane? Why has the desired yaw changed so dramatically?
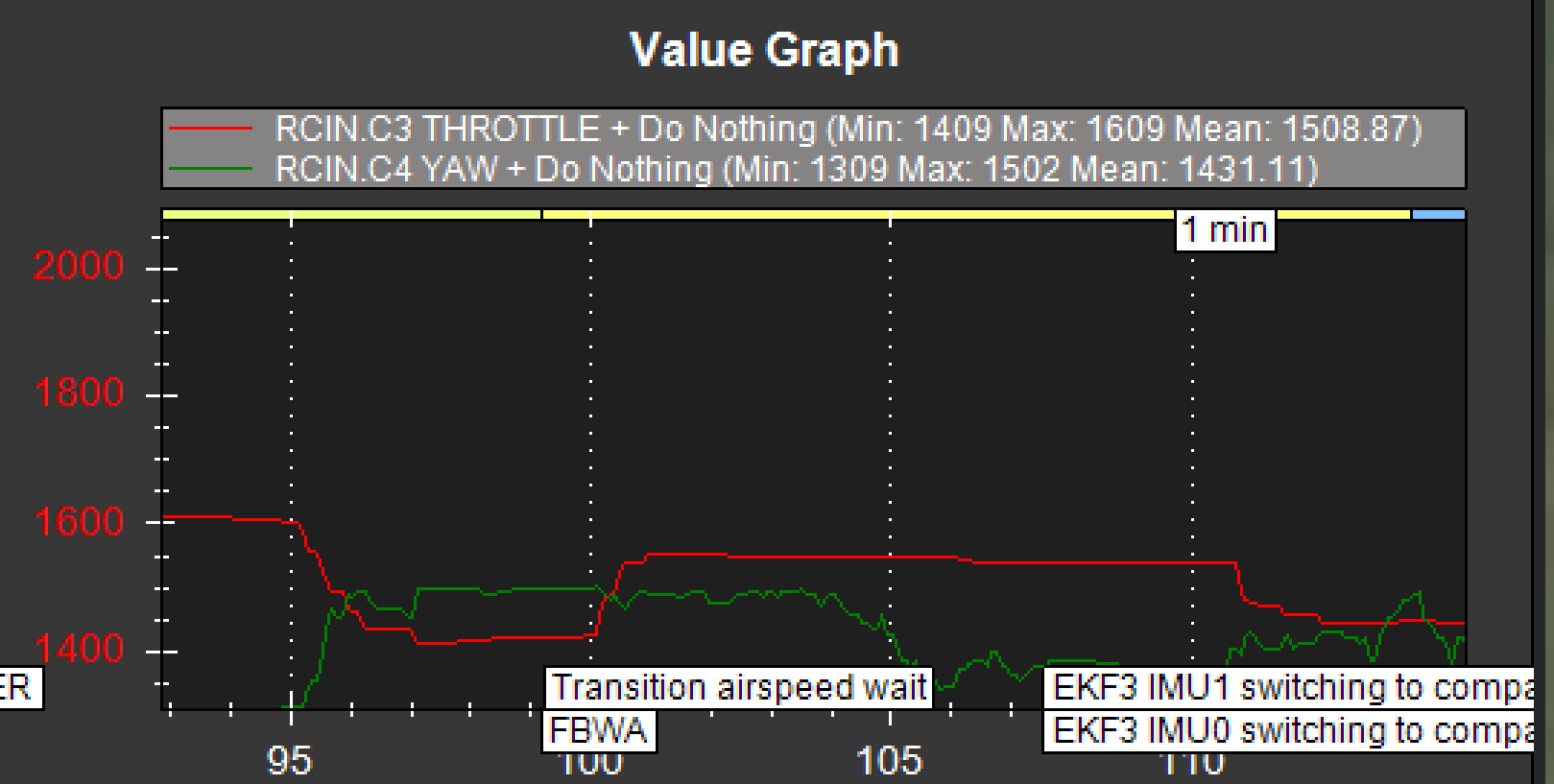
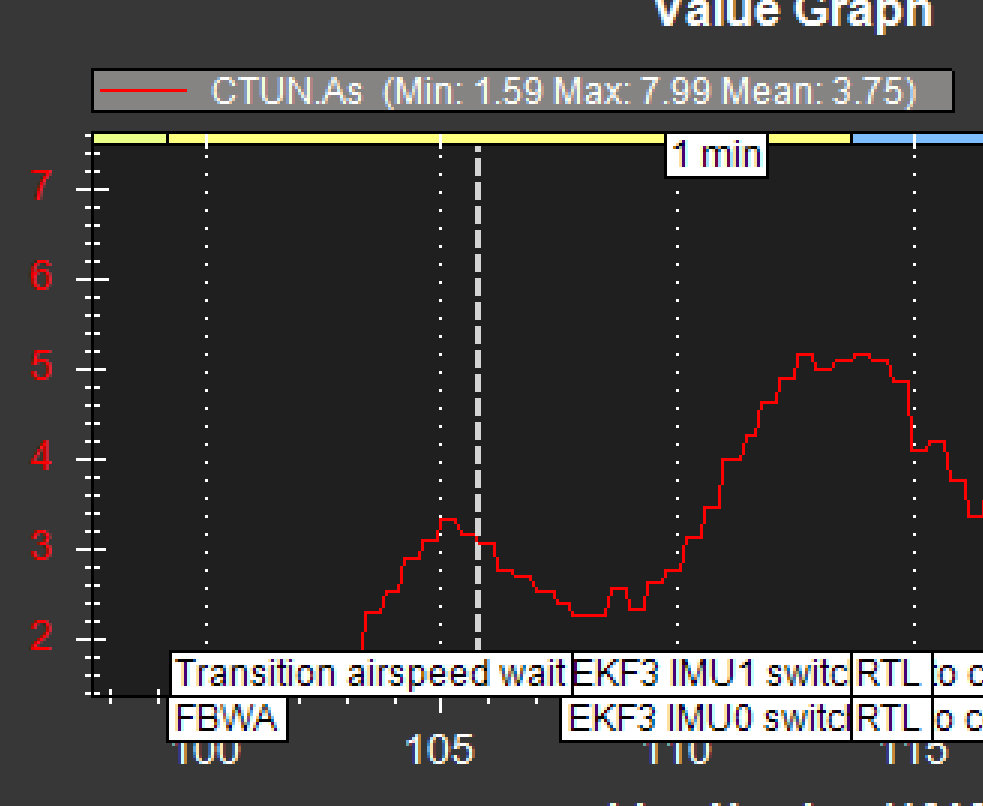
I attach the throttle/yaw inputs, the desired and measured yaw, and the estimated airspeed during the transition period:
13:56:53 - transition initiated
13:56:57 - estimated airspeed drop
13:56:58 - estimated airspeed increases again but it’s too late
13:56:59 - transition failed
To resume: I know that given the insufficient commanded throttle, the transition was bound to fail. But why was this yaw change and airspeed drop?
How are the course and heading controlled during the transition? I hope the whole thing was not caused by weathervane feature, which should (?) be blocked then? Maybe there could be option of blocking any directional (heading and yaw) changes during transitioning?
How can I know if the transition has started and failed/ended successfully from the mavlink messages? Other than parsing the text messages? Is there the current status somehow reported? Does the flight mode change?