Hello, for a mission with my boats I need to disable or enable the fence during the mission (in order to move from a zone to another)
On the simulator I can do it with the plane but not for the rover, although the command is supposed to be available according to the documentation. The command do_fence_enable is not in the scrolling menu…
Thanks for the report. I’ve added an enhancement request for Mission Planner here. It’s not difficult to add but until then it should be possible to use MP’s “UNKNOWN” command.
Re seeing the rally points during editing of the fences, there’s a PR being reviewed here that allows them to be seen at the same time. I’ve put a comment on that PR to show that this has been requested in this thread too.
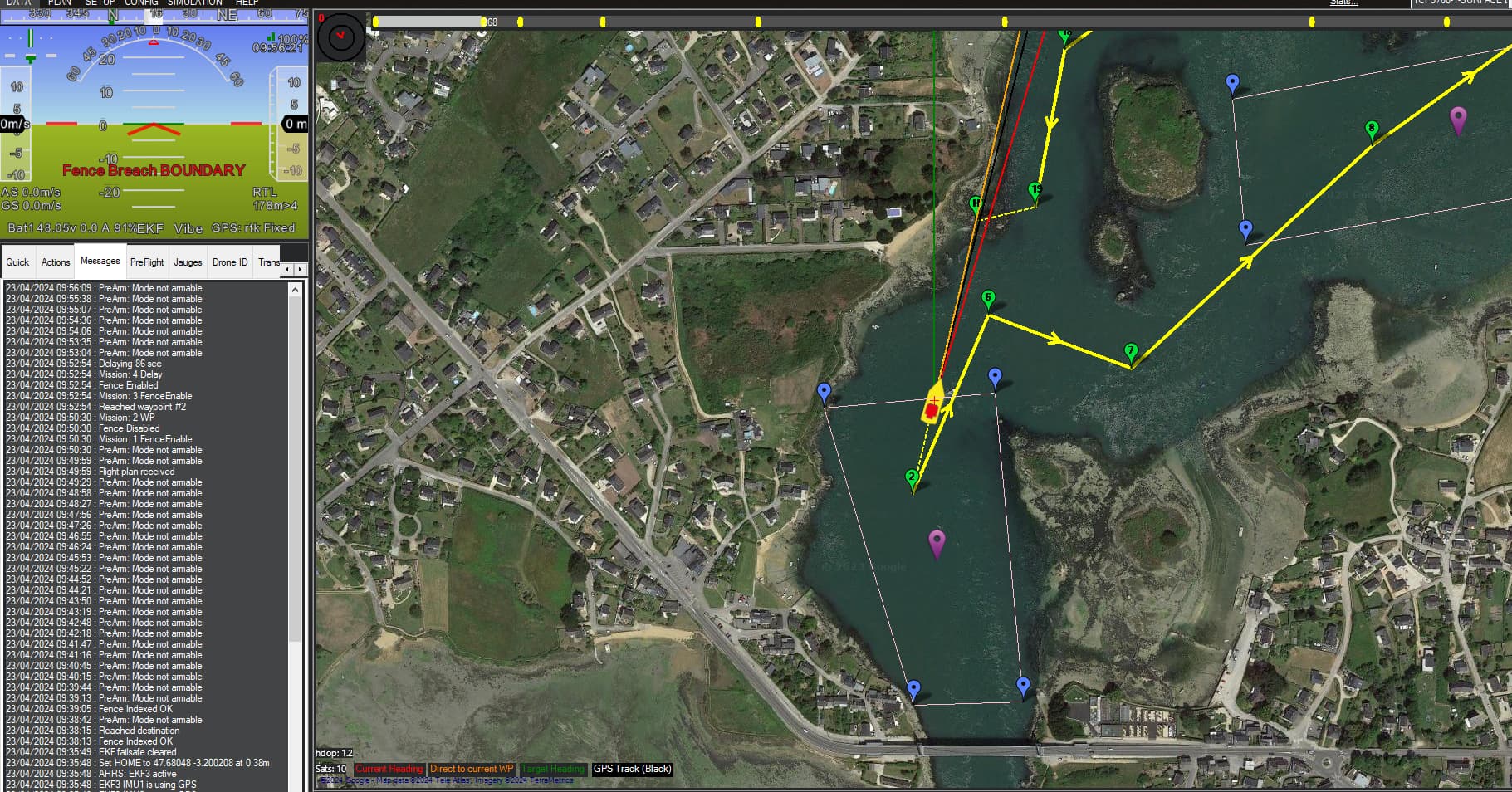
So I guess the question is, when it breached the fence and switch to RTL, why did it then travel home instead of to the nearest rally point?
… or maybe the question is why did it trigger a fence breach when it was inside a fence? By default, being outside any inclusion fence is a breach but maybe you’re expecting that it should only be a breach if the vehicle is outside all inclusion fences. I’m sure we added support for this difference. @peterbarker do you remember this issue?
I’ve looked into this and only Plane supports multiple separated inclusion fences. There is a WIP change to extend this to Copter and Rover but it is more complex because Copters and Rovers may also stop at the fence meaning changes are required to Avoidance code as well.
So I think this has become an enhancement request so I’ll take it off the 4.5 issues list (e.g. it’s not a bug)