It was suggested by a respected member of RC Groups to contact you, the developers, of an Issue I have.
Current setup of 2 crafts:
450 QUAD
20A 20A Mini Simonk ESCs
3DR IRIS motors
PixHawk 2.4.8
Firmware 3.3.3
FrSky X8R Rx connected SBUS
FrSky XJT Tx module in a Turnigy 9x Tx modified with SmartieBoard 9xtreme
550 HEX
AirGear 350 motor/ESC set
Same FC, Rx and Tx
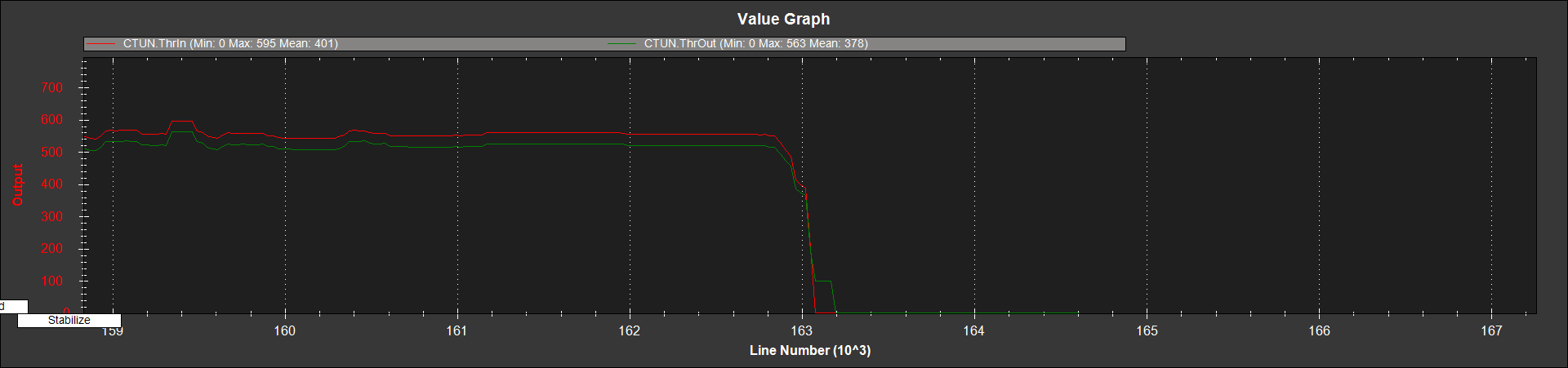
Since before the Tx mod, (Stock Turnigy 9x with 9X8Cv2 Rx and PPM converter) I would experience a motor shut off delay.
IE, the motors are still powered after cutting throttle.
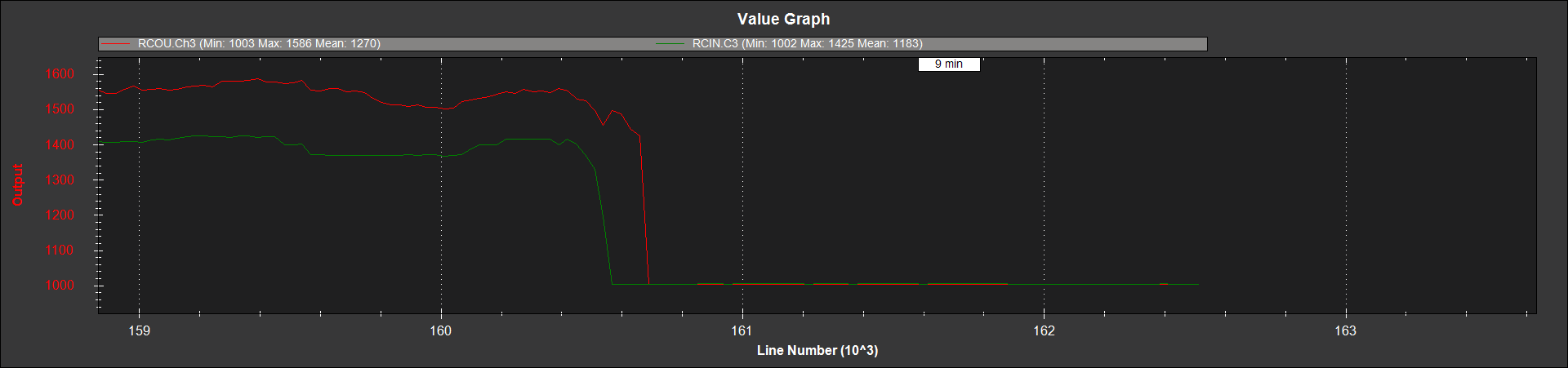
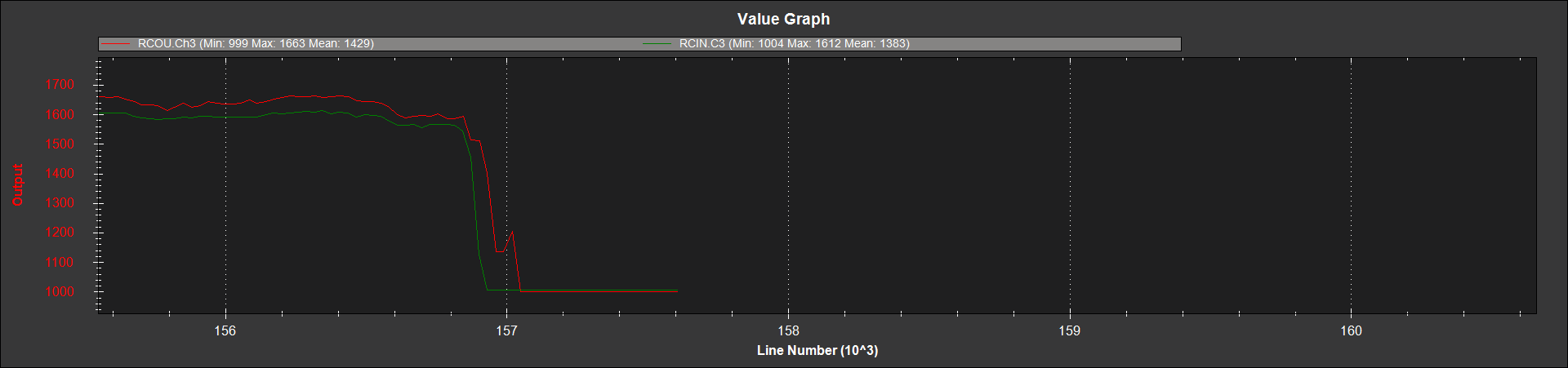
I posted the logs for both craft in RC Groups and sure enough, they pointed out there is a delay between RCIN and RCOUT on Ch3.
The crafts “bounce” on contact during any automated landings - motors do not shut off instantly like what I see my friends posting.
I still can’t find anything to exlain this PM.Hoping someone here with a bit of code knowledge can spot something (so include the graphs) and determine whether it’s feature in the code or something else.But I have found exactly the same behaviour on my Nova Pro with a Pixhawk fitted.I must admit it doesn’t bther me and I’ve never really noticed it.