Good Day!
Can you please help me with suggestion about is that situation is normal or not:
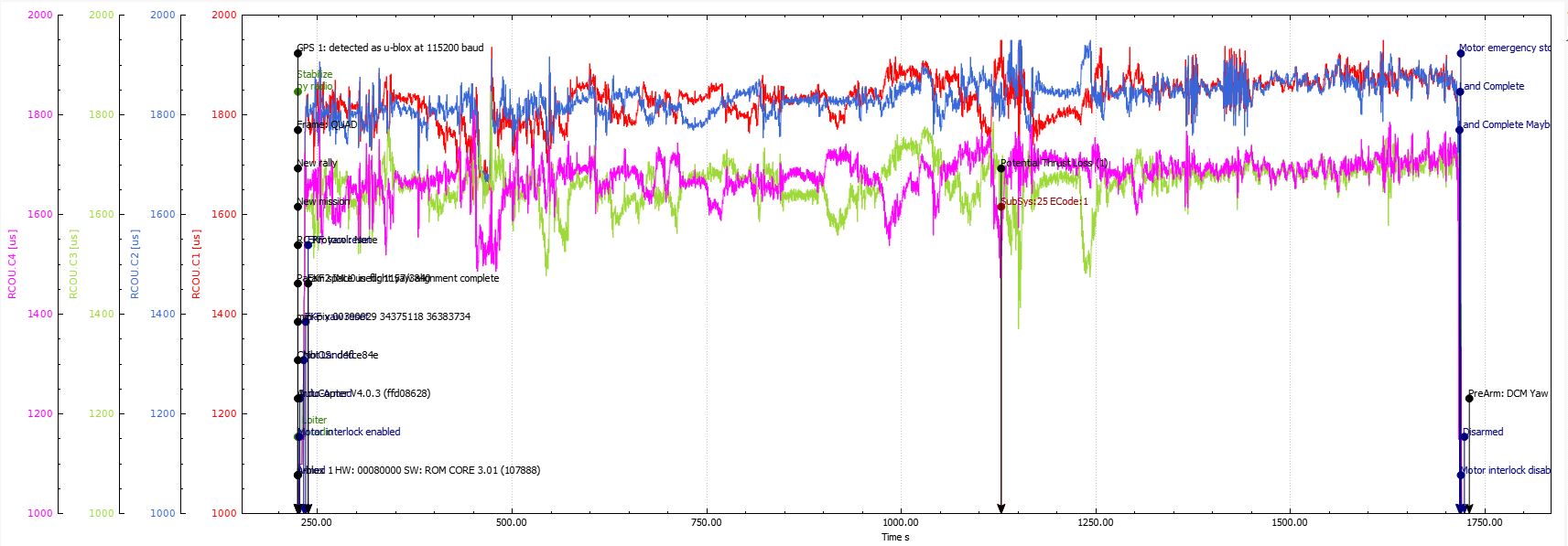
I am using Arducopter firmware v4.0.3 and copter is flying perfectly fine, but according to telemetry logs ch1out and ch2out are spinning faster comparing to ch3out and ch4out. typically difference in PWM around 150 if it stay lavel.
Frame type is: PLUS. (+)
I checked https://ardupilot.org/copter/docs/connect-escs-and-motors.html
And if I understood correctly chXout correspond to:
3
2 1
4
Thing`s that I checked:
-
Weight balance and it`s look good to me.
About weight balance it is easy for me to understand if one motor will spin faster\slower or for example two but in cross direction. For example:
1500
1500 1700
1700
, but not in that way:
1700
1900 1900
1700 -
I assumed that one motor can have different Kv value because of inaccurate manufacturing or something… But that don`t explain why second, opposite motor spin at “speed of same PWM value” (I know that there is no such thing like “speed of PWM” )) )
-
Just a guess, is Arducopter in case of PLUS frame type create main thrust using motor “2” and “1” and correct direction`s using motor “3” and “4” ?
Can you please give me a suggestion what else can be wrong?
Reason why I asking:
Currently drone weight is around: 2120 gram, motors are SunnySky 4108 380Kv, props: 15*5.
it use battery that consist of 4s4p li-ion. Full charged voltage without load is: 16.6V (4.15V per cell).
Battery may be safely discharged to 3V per cell under load.
But, starting from 13V (3.25V per cell) Arducopter (mission planner) notifying me about: “potential thrust loss” and probably that is true because motor “1” and\or “2” are spinning at 1900-1950 PWM. While motor “3”, “4” only at 1750-1800. As result I have to land drone while battery is still have a lot of energy.
I understand that I can change battery to 5s4p, but that will increase total weight at 200 grams and as result drone will consume more energy to fly, but probably with increased Voltage I will be lucky to drain battery to 95%.
But, maybe and probably with increased Voltage drone still will spin two motors faster and with increased power consumption in the end I still will have same problem.
So, once again, Can you please help me with a suggestion what can be wrong?
Thank you in advice.
P.S. A telemetry log file:
https://drive.google.com/file/d/1Qtdp9rFNLm2_33s1HW7zZVSuDwAscMUe/view?usp=sharing
You may notice difference from the beginning, but, from 73% to 75 drone stay level without a lot of control from RC side.