I launch my XUAV Clouds via catapult. It’s always been successful with a headwind, but it’s marginal w/o one.
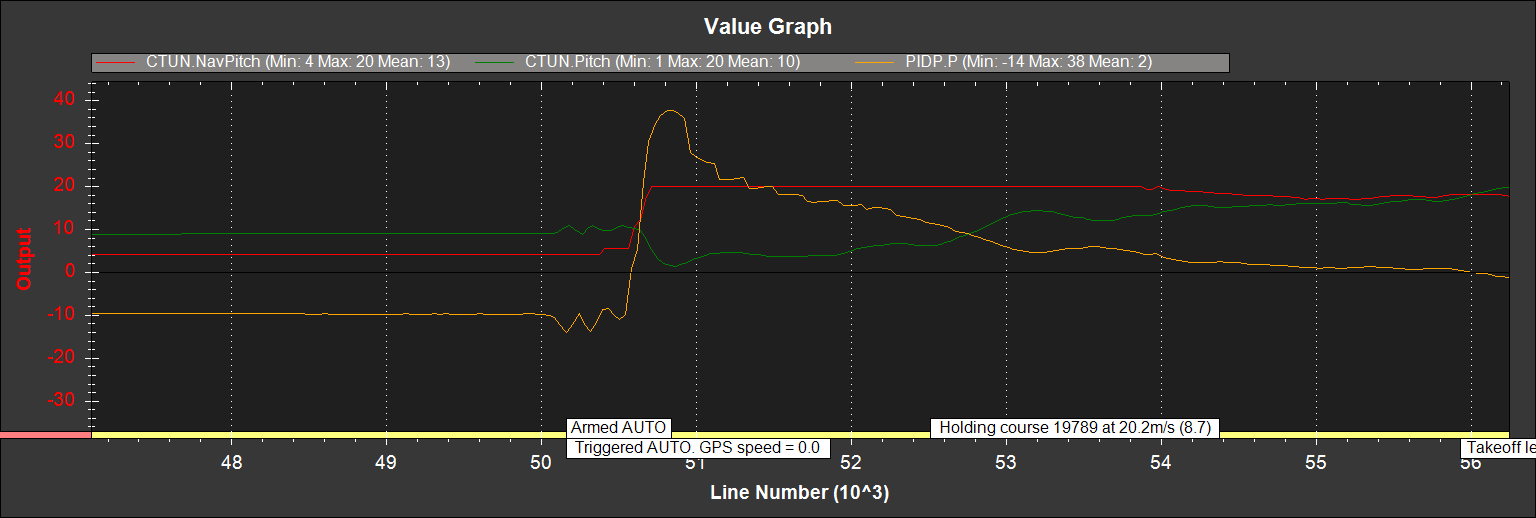
At least part of the reason is that the target pitch is sub-optimal as the plane exits the ramp. The following graph shows that the planes’s actual pitch while resting on the catapult ramp is 8 to 9% while the pitch target prior to launch is 4-5%. This discrepancy makes the P term for the pitch control -10 prior to launch.
When the catapult is triggered, the plane bounces a tiny bit (the three squiggles on the green line of actual pitch). At the end of the catapult ramp the pitch controller is nosing the plane down when the pitch target suddenly changes to 20% (which is the takeoff pitch set for the takeoff waypoint).
The problem appears to be that the pitch controller is trying to make the plane’s pitch less than the pitch of the ramp. Hence the PID controller drives the nose down to correct the error as it leaves the ramp. While the desired pitch from the takeoff waypoint also shows up at this point in time, the PID controller can’t react quickly enough and the actual pitch drops to zero before it starts to recover.
I’m considering raising the base of my catapult to reduce the launch angle from 9% down to 5%. But it would be much easier if I could change the desired pitch parameter for the moment prior to launch. Does “nudging” work for pitch during automatic takeoff?
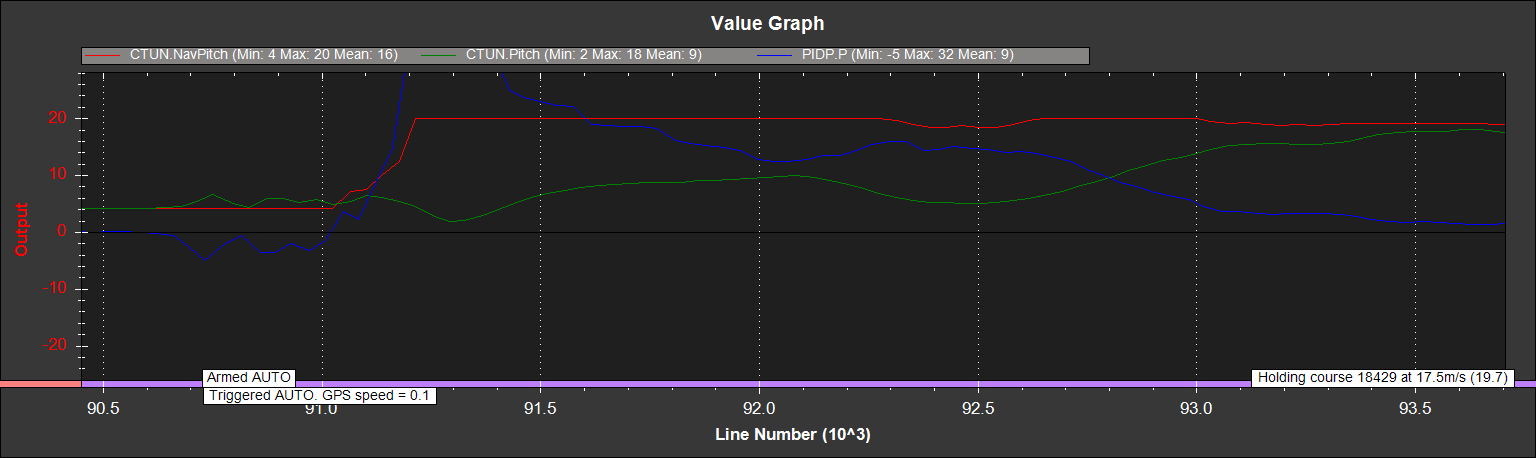
My first experiment of reducing the ramp angle helped a little bit. But wasn’t great. With desired pitch about the same as the ramp angle, at least the desired pitch never dropped below the starting angle. But actual pitch still fell almost to zero and the pitch PID was still negative at the ramp exit.
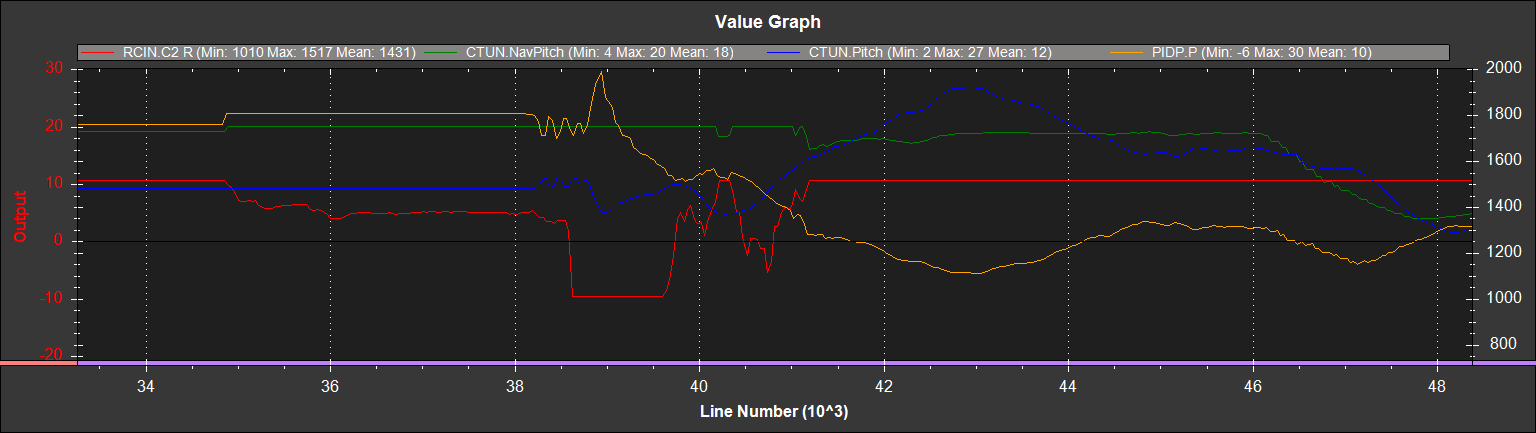
On the second flight, I went back to the 9% ramp angle. I enabled the airspeed sensor for “use”. And I pulled the elevator stick back for takeoff. At the beginning of the graph, while sitting on the ramp the CTUN desired pitch is already at 19 degrees prior to any elevator input. A small deflection of the elevator controls (red line) increases the desired pitch to 20 degrees. Just after launch I fully deflect the elevator input without any additional effect on CTUN pitch (it’s already requesting the max takeoff pitch). Actual pitch drops to ~5% a couple of times before the climb begins in earnest…but the behavior of both the CTUN controller and the PID controller P look correct.
Enabling use of the airspeed sensor seems to be helpful in getting the CTUN controller to call for “early” pitch. It was just dumb luck that I decided to enable the sensor. Go figure.
My conclusion is that if you desire the quickest auto throttle response and maximum early up pitch output from the flight controllers…remember that you can “nudge” both these parameters during the auto takeoff. My new checklist calls for enabling auto mode, fully advancing the throttle (which shouldn’t spin the motors at this point), pulling back on the elevator control…and only then firing the catapult.