Hello all,
I have been a frequent user of arducopter for my gasser heli and recently we have developed a sensor that is very much needed for the gasser helicopters that is connected to autopilot via I2C port and reporting the fuel level based on a converted voltage reading. So that the users can set up the failsafe levels like using a battery powered helicopter and do not need to worry about what happens next when fuel level is low. It does also report fuel level in PWM values as well.
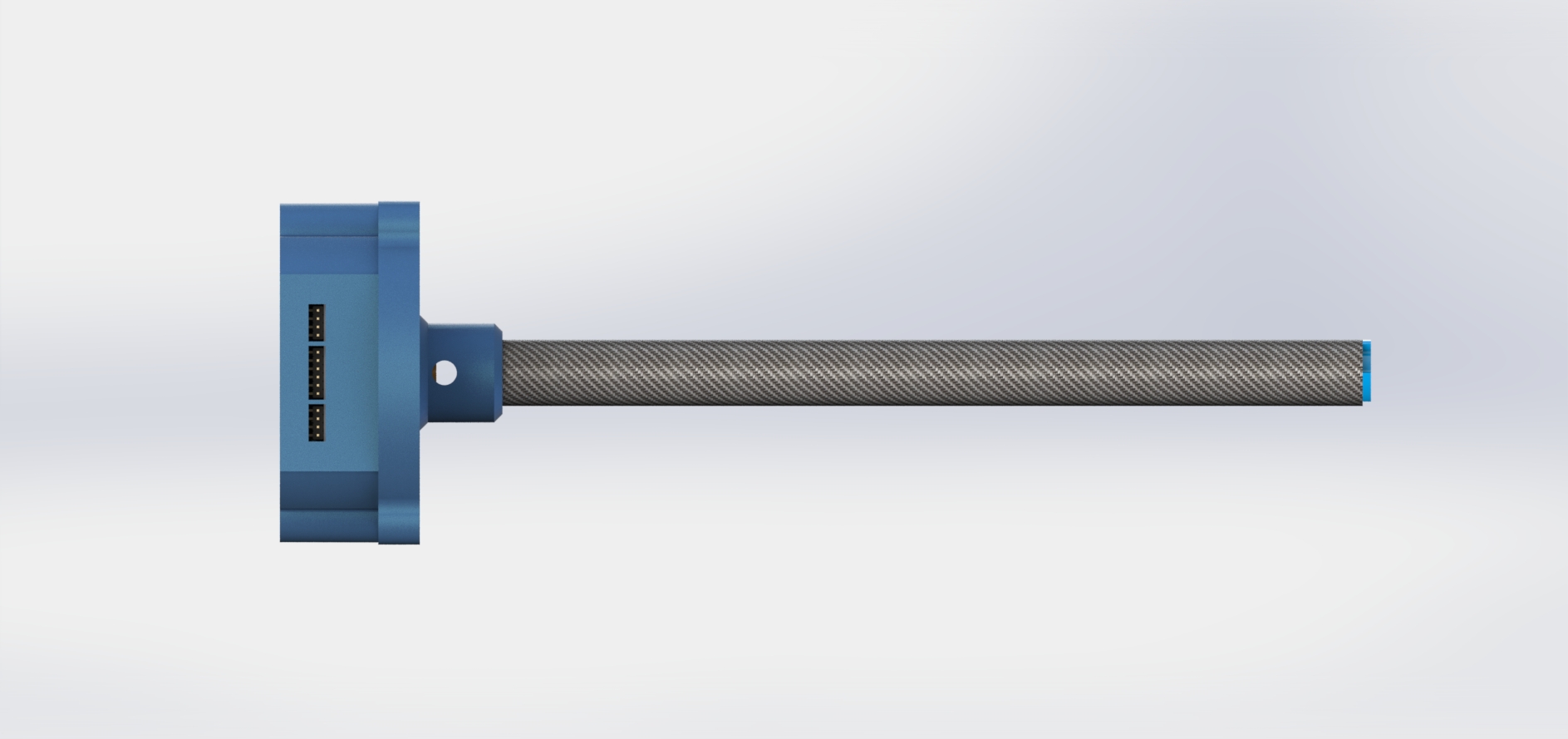
I am attaching some pictures of the product and we are going to be ready to take orders soon for this model. It is better to use the sensor for fuel tanks capacity of 650 cc or above. Minimum probe length is 100 mm up to 2000 mm.
One advantage of this sensor is for the plane users which is while flying invert the sensor is adapting itself to the flight mode and keep on reporting as usual.
If anyone is interested in, can contact me via tyelutas@gmail.com.
Stay safe.
T.
2 Likes
What is the weight? Can you share the dimensions?
Hello Amil, If you can tell me your tank dimensions then I can find out the probe length in order to tell you the weight.
The weight of the sensor to fit a 650 cc tank is 20 gr if the material chosen PETG and 30 gr if the material is chosen 6061 T6. If you can share me your email once the datasheet is ready I can share with you.
Hello all,
We have succesfully interconnect our fuel level sensor to Ardupilot thru I2C with the current SMBus feature available inside the current stable code. I can shared a video that I have taken recently showing how it is actually working for those who are interested. It demonstrates a probe specifically built for 1.9 lt depo 90 mm long.
Video link;
https://drive.google.com/file/d/1qpoGj5ThOcJdm5zBeT4VE_JXHV3c-hoa/view?usp=sharing
Datasheet;
https://drive.google.com/file/d/1qpoGj5ThOcJdm5zBeT4VE_JXHV3c-hoa/view?usp=sharing
Please contact me for further details.
Thanks,
Tolga
Hello again,
I have a question for the developers here to give us a resolution of an issue.
As you may see in the video on myu previous post we used Pixhawk 1 for the testing. Apart from that we do have Pixhack V3 and Pixhack V5 autopilots that we use at our systems.
Pixhack 3 worked the same way it did as Pixhawk 1 but Pixhack V5 we couldn’t manage to communicate with the same sensor. However we managed to get the OLED display giving data from the same port which is a I2C communication which is same port that communicates with the sensor.
Our fuel level sensor I2C address is 0x0B. It is waiting request from autopilot and responds to that request accordingly.
We are scratching our head here but maybe this is a one minute thing for you to show us what we are missing.
Thanks,
Tolga
Well we sorted out ourselves as we found out that there is a new parameter added BATT_BUS where we needed to define the bus port using each device. Not it is working like a charm on Cube autopilot as well…
For those who are interested in, i would like to inform that in the same sensor we also have the fuel flow info displaying as current withdrawn.
1 Like