I’m trying to install the ArduRover 4.1.2 firmware on my pixhawk 5x by Holybro but I’m having problems since Mission Planner says that it cannot find the proper board model.
I’m able to connect the board to mission planner and I can see the heading and the GPS position on the map. Then, I disconnect it and go to “Install Firmware Legacy”, it ask me if it is a Linux Board and I say NO, then ask me if it is a Pixhawk and I say YES and then it says “Upload ChibiOS” and I say no.
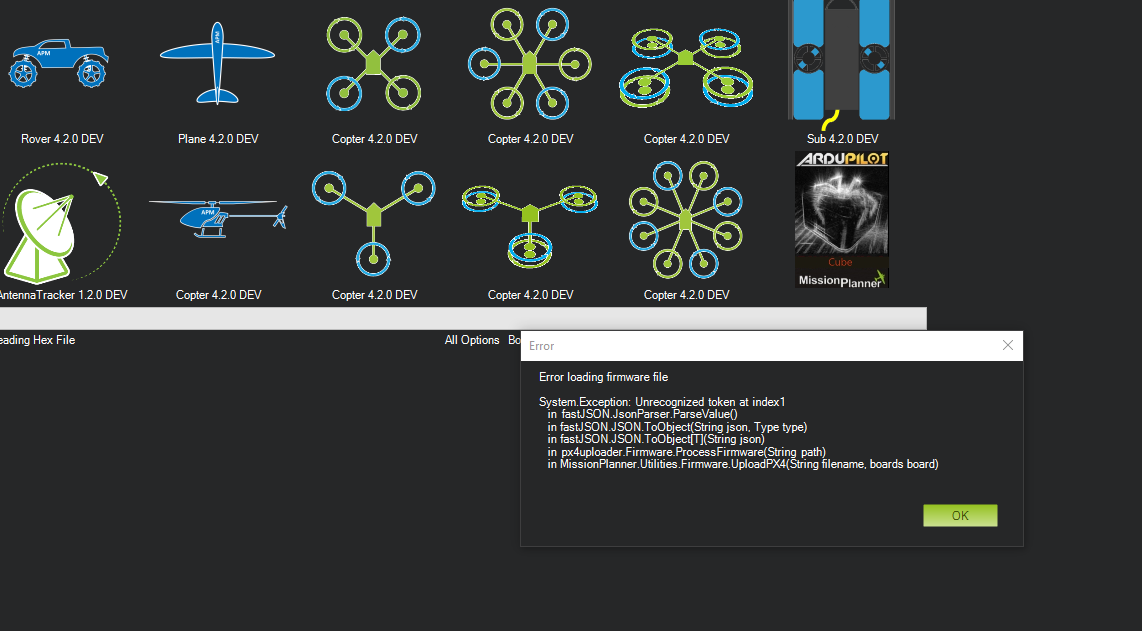
After this, it tries to download some information from internet and then it gives this error:
ERROR: firmware not suitable for this board fw:9 - board:51
My board should be: PX4 FMU v5X.x from Auterion.
What should I do in order to use ArduRover? I should use my pixhawk board for a tank steering rover.
If I use the “Install firmware” option it detects my board as:
board type 51 brdrev 0 blrev 5 fwmax 2064384 chip 10016451 chides STM32F7 on COM5
but when I click on ArduRover 4.1.2 OFFICIAL it says that there is no firmware available for this board!
I believe you will have to load V4.2.0-Dev (Master/development) firmware for that board at this time. Hit Ctrl>Q from the Install Firmware screen in Mission Planner to load the Dev version or download the .apj from here and use the “load custom firmware” button: Pixhawk5X
I tried to use the “bootloader update” function but it doesn’t work since it gives errors: sometimes it says that it cannot recognize the board while other times it gives the bootloader error with invalid operation.
Is there a way to force the upload of the bootloader? May be with an external programmer?
Do I need to short circuit any pins in order to make the board enter into programming mode? May be the process fails because of this.
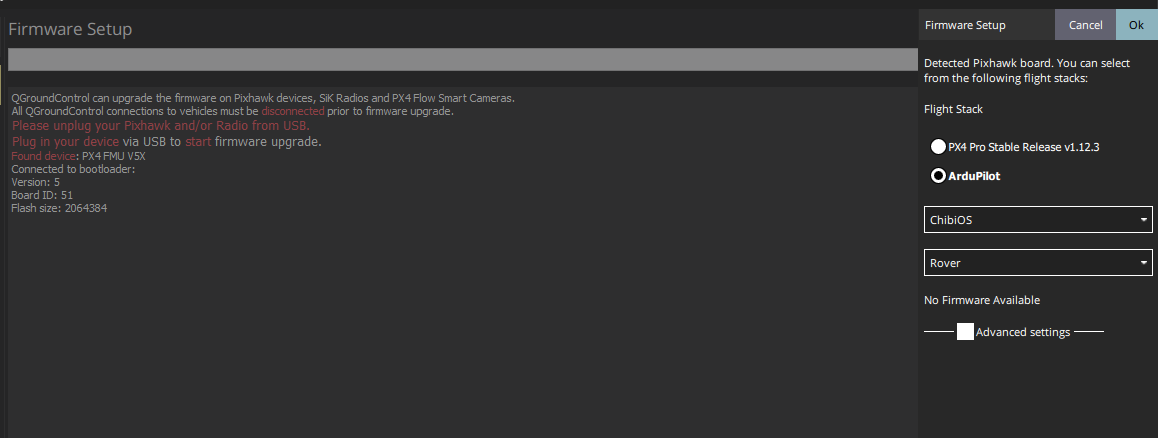
I used QGroundControl to upload a custom firmware and I selected the ArduRover from the latest firmware available for the pixhawk 5X and I think I did it!
Now, Mission Planner successfully recognizes the board as ArduRover V4.2.0-dev!
So, if someone else has my same problem, I solved it by uploading the official firmware from QGroundControl and then I uploaded a custom firmware by selecting it from the latest beta releases as @dkemxr and @Yuri_Rage suggested.