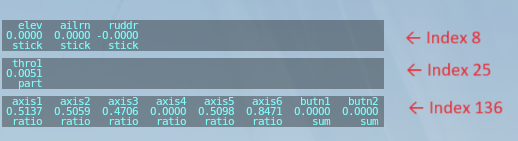
The following image will be displayed on the cockpit screen. Please let me know if each value changes when you move each axis of the joystick.
In Plane-4.2, index 8 and 25 were obtained as RCIN.
In Plane-4.4, index 136 is obtained as RCIN.
The latter method is superior to the former because it allows a wider range of aircraft to be controlled.
In my case, depending on the type of joystick the value of Index 136 is fixed to zero even though the value of Index 8 or 25 varies and the RCIN cannot be obtained. This seems to be a problem on the X-Plane side, not on the ArduPilot side.
In my case, Index 8 and 25 varies but Index 136 does not. It fixed to -0,010.
So, considering with your informationit, it must be X-Plane side problem.
But it is very curious that some joystick works and others not. Do you know why?
You are correct! Thank you hatnac. I was out of right way.
My objective is to fly automated aerobatics. It surely be conducted in anto mode only.
I will try soon.
And I will contact with X-Plane producers and report this issue.
I am having just the same problem although I am getting closer now with @hatnac notes, might I have a look at all of your data out ticks @hatnac ? I have an Interlink plus so should be good.
I contacted with X-Plane support. They say I must consult with ArduPilot side on this issue but as I can not understand why, I am contacting again with them.
This issue has nothing to do with ArduPilot. I think all you have to do is tell X-Plane support that “Joystick raw axis deflections” are not output depending on the type of Joystick.
I mean you don’t have to talk to X-Plane support about ArduPilot. If you tell them that there is a communication problem between ArduPilot and X-Plane, X-Plane support will respond that the problem would be on the ArduPilot side.
Hi again, after following the suggestions here, I managed to fly fixed-wing aircrafts successfully. However, when I try to configure a VTOL aircraft (after I enable Q_ENABLE) the aircraft would take-off to the desired altitude successfully (in quadcopter mode) and transition to fixed-wing mode, fly following the set flight path, but after that it would could not track the desired altitude and keeps climbing until the end of the mission. I have also realized that the target pitch is always positive despite the target altitude. Do you have any suggestions for that?
Yes, I have tuned my model before enabling quadcopter mode (Q_enable). After successful tests using only fixed-wing mode, I enabled quadcopted mode (to enable VTOL) and tuned my q_ parameters and got satisfactory vertical take-off and landing performance (using the VTOL rotors). This issue arises after transition. Does tuning differ when Q_enable is 1?
update: I think it is probably another radio calibration issue, the same configurations as the built-in “quadplane” simulator of the mission planner was used, the aircraft would still lock-up on some positive pitch angle and keeping climbing throughout the flight… Unfortunately, I still couldnt figure a workaround for this problem. Nonetheless, I think the issues involving X-Plane SITL with ardupilot through mission planner should get the developer’s attention.