“xplane_plane.json” template can be found here.
Following is the json file edited for your environment.
You can copy, paste and edit it on notepad. Save it as “xplane_plane.json”.
# XPlane DREF map file for a simple plane
# assumes: Aileron, Elevator, Throttle, Rudder, flaps
{
"settings" : { "debug" : 0 },
"sim/operation/override/override_joystick" : { "type" : "fixed", "value" : 1 },
"sim/operation/override/override_throttles" : { "type" : "fixed", "value" : 1 },
# forward throttle, up to 4 engines
"sim/flightmodel/engine/ENGN_thro_use[0]" : { "type" : "range", "range" : 1, "channel" : 3 },
"sim/flightmodel/engine/ENGN_thro_use[1]" : { "type" : "range", "range" : 1, "channel" : 3 },
"sim/flightmodel/engine/ENGN_thro_use[2]" : { "type" : "range", "range" : 1, "channel" : 3 },
"sim/flightmodel/engine/ENGN_thro_use[3]" : { "type" : "range", "range" : 1, "channel" : 3 },
# control surfaces, using yoke positions not surface overrides
"sim/joystick/yoke_roll_ratio" : { "type" : "angle", "range" : 1, "channel" : 1 },
"sim/joystick/yoke_pitch_ratio" : { "type" : "angle", "range" : 1, "channel" : 2 },
"sim/joystick/yoke_heading_ratio" : { "type" : "angle", "range" : 1, "channel" : 4 },
# assume flaps on channel 5
"sim/cockpit2/controls/flap_ratio" : { "type" : "range", "range" : 1, "channel" : 5 },
# joystick inputs
"axis1" : { "type" : "joyaxis", "channel" : 1, "input_min" : 0.2, "input_max" : 0.8 },
"axis2" : { "type" : "joyaxis", "channel" : 2, "input_min" : 0.2, "input_max" : 0.8 },
"axis3" : { "type" : "joyaxis", "channel" : 3, "input_min" : 0.8, "input_max" : 0.2 },
"axis4" : { "type" : "joyaxis", "channel" : 4, "input_min" : 0.2, "input_max" : 0.9 },
"axis5" : { "type" : "joyaxis", "channel" : 5, "input_min" : 0.2, "input_max" : 0.9 },
"button1" : { "channel" : 6, "mask" : 1 },
"button2" : { "channel" : 7, "mask" : 2 },
"button3" : { "type" : "joybutton", "channel" : 8, "mask" : 24 },
"button4" : { "type" : "joybutton", "channel" : 9, "mask" : 4 }
}
I assume you are running MissionPlanner and X-Plane11 on the same Windows PC. “xplane_plane.json” should be copied to the following folder
Documents\Mission Planner\sitl\xplane
The preparation is now complete.
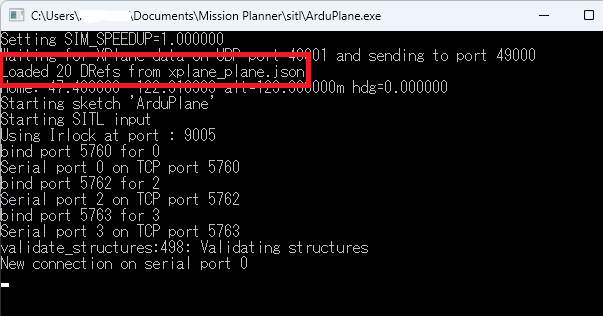
When you start SITL, ArduPilot.exe will start in a separate window, and if the json file is successfully loaded, you can see a message “Loaded 20 DRefs from xplane_plane.json” in this window. If not, you will see “Loaded 20 DRefs from @ROMFS/models/xplane_plane.json”.