Although I can perform radio calibration, the indicator does not respond to the servo output and the motor test does not work.
Do you know the cause?
Please forgive me for my poor English.
Although I can perform radio calibration, the indicator does not respond to the servo output and the motor test does not work.
Do you know the cause?
Please forgive me for my poor English.
It’s hard to explain, but I’m having trouble and would like some help.
I’m setting up Cube Orange in Mission Planner, but it’s not working anymore.
Last time I changed so many parameters that I couldn’t remember where I had changed them, so I started over from installing the firmware.
Then I did a reset to default values from the full parameter list.
https://ardupilot.org/rover/docs/apmrover-setup.html
I proceeded with the settings according to the instructions, and was able to set up ARMD, but the motor did not move during the motor test.
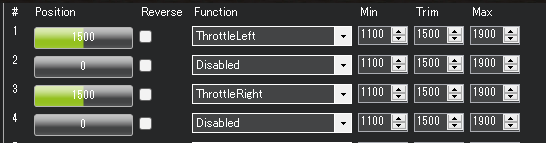
Since it is a crawler, throttle left to 1 on the servo output.
3 is on the right side of the throttle.
In the motor test, for example, even if I tap C, there is a communication error motor 3 with the autopilot, and the warning sound sometimes comes on and sometimes doesn’t.
If you click A, a communication error and motor 1 will occur as well.
Flight mode and disarming can be controlled from the transmitter.
When I tested the motor by connecting Cube Orange to my computer using a USB cable, I heard a long popping sound and a short beeping sound, but the motor did not turn.
I also increased the throttle % to 100, but the result is the same, and whether I use test motor A, test motor B, or test motor C, the result is the same, only a whistling sound.
Why doesn’t the motor run?
Hey, it is not easy to help without being here but you can try a few things:
If all of this works it would be strange and I don’t how I could be more of help.
Have a good day !
A.Larribau
Thank you for your guidance.
-The motor operates with a regular PWM generator.
If you use ardurover rc1 and 3 are the two mains RC so if they don’t moove it is why.
what kind of vehicle do you use ? how is it motorised ? On which output did you plug your motors ?
Modify the function associated to your output and find the function that matches your configuration.
Thank you for your help
My CR1 and CR3 settings are throttle left and throttle right.
Before that, the GPS monitor, GPS: 3D Fik
GPS2: No Fix
So I think I have to check this first.
However, it’s snowing outside today, so I can’t make any further adjustments.
(I can’t get the rover out)
We will report the results at a later date.
We would like to inform you that the issue has been resolved.
I think the reason why I couldn’t output to the main output was due to the failsafe.
Currently, the main output is output with all weapon checks and failsafes disabled.
As new questions arise, I will create a new topic.
Thank you for your cooperation.
