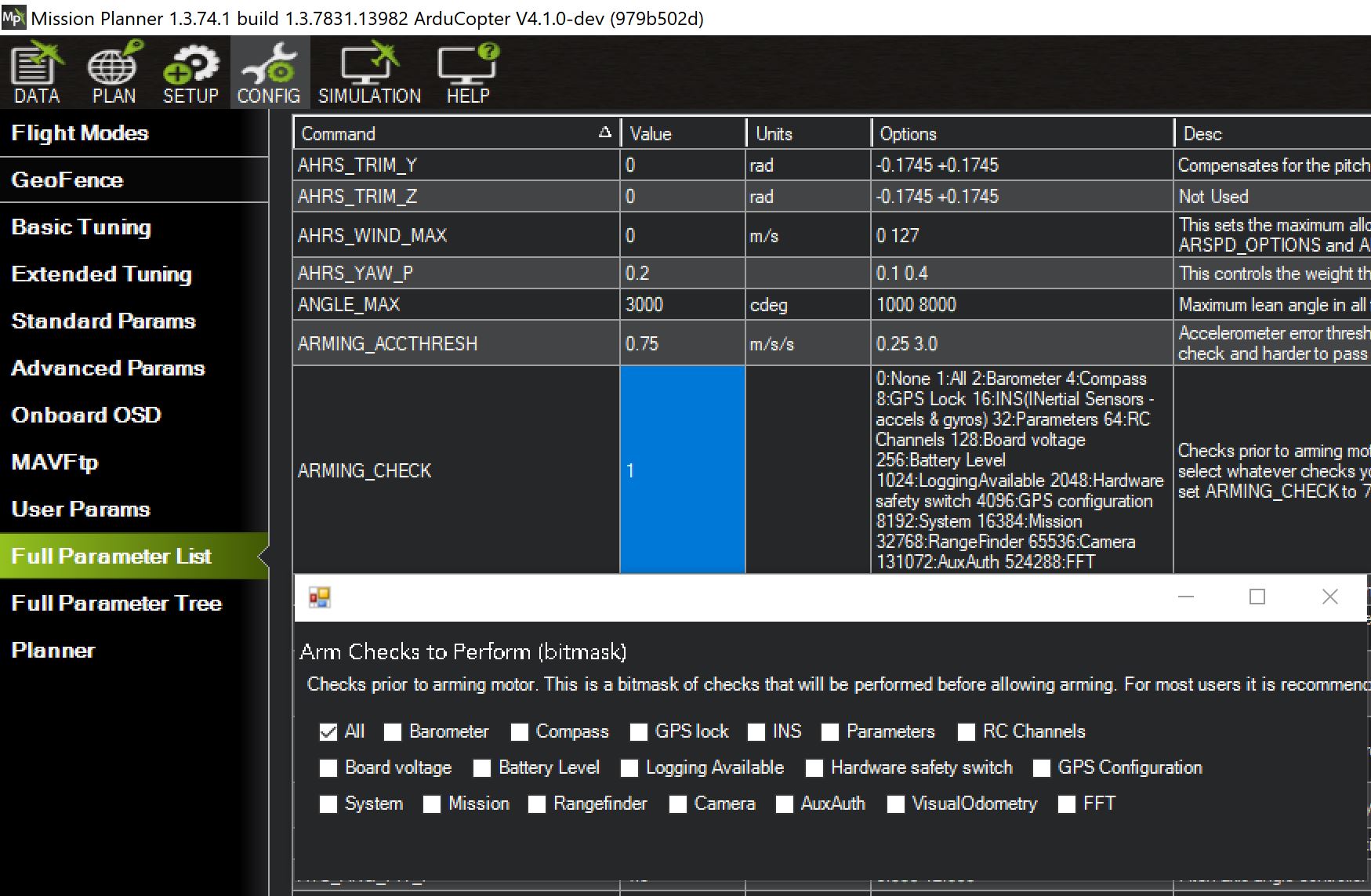
I am having troubles modifying the ARMING_CHECK parameter. When I click on it a window pops up and I have to select and deselect whatever I need. I select everything except All, GPS lock and GPS Configuration and then I close the window. The value remains 1. I’ve managed to change it to 0 by deselecting All. I’ve then tried a lot of combinations but it never saves and it remains to 0.
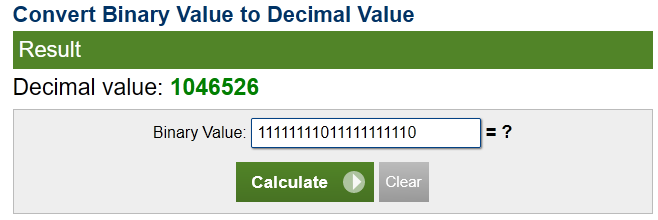
I’ve managed to trick it however. I saved the parameter list as a file, I’ve modified ARMING_CHECK to -9 inside the file and then I’ve loaded the parameters into the Mission Planner and ARMING_CHECK is set to -9 now.
Is this the normal behavior ?
Also, I’ve checked and ARMING_CHECK -9 value disables GPS lock but leaves GPS Configuration enabled. Is that ok ?
Right. Look at the Mission Planner Changelog which is where that snip came from. That’s what you are running. Run Stable if you want but sometimes a change is made daily, or more often than that, in Beta that fixes some problem.
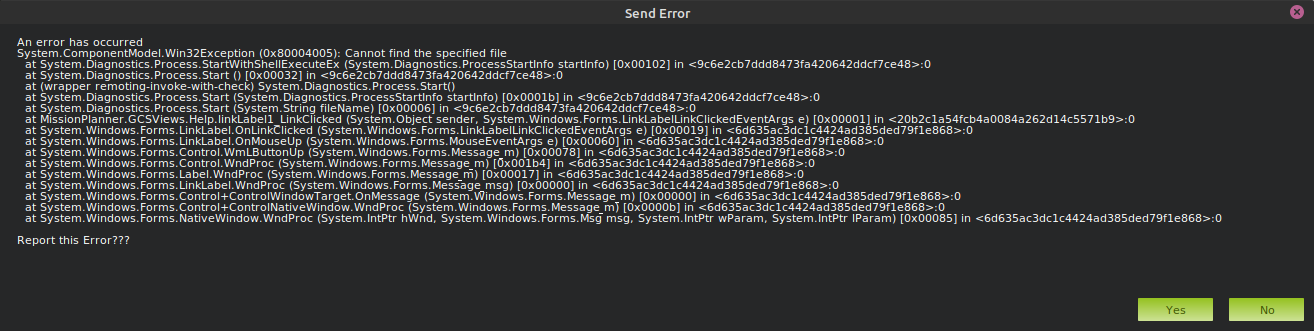
I’ve tried that. It doesn’t work. A small window pops-up and something loads then it closes itself and never opens.
I’ve tried it several times but the version is remains 1.3.74.2.
I sometimes get errors like “Update Failed Too many open files”
and